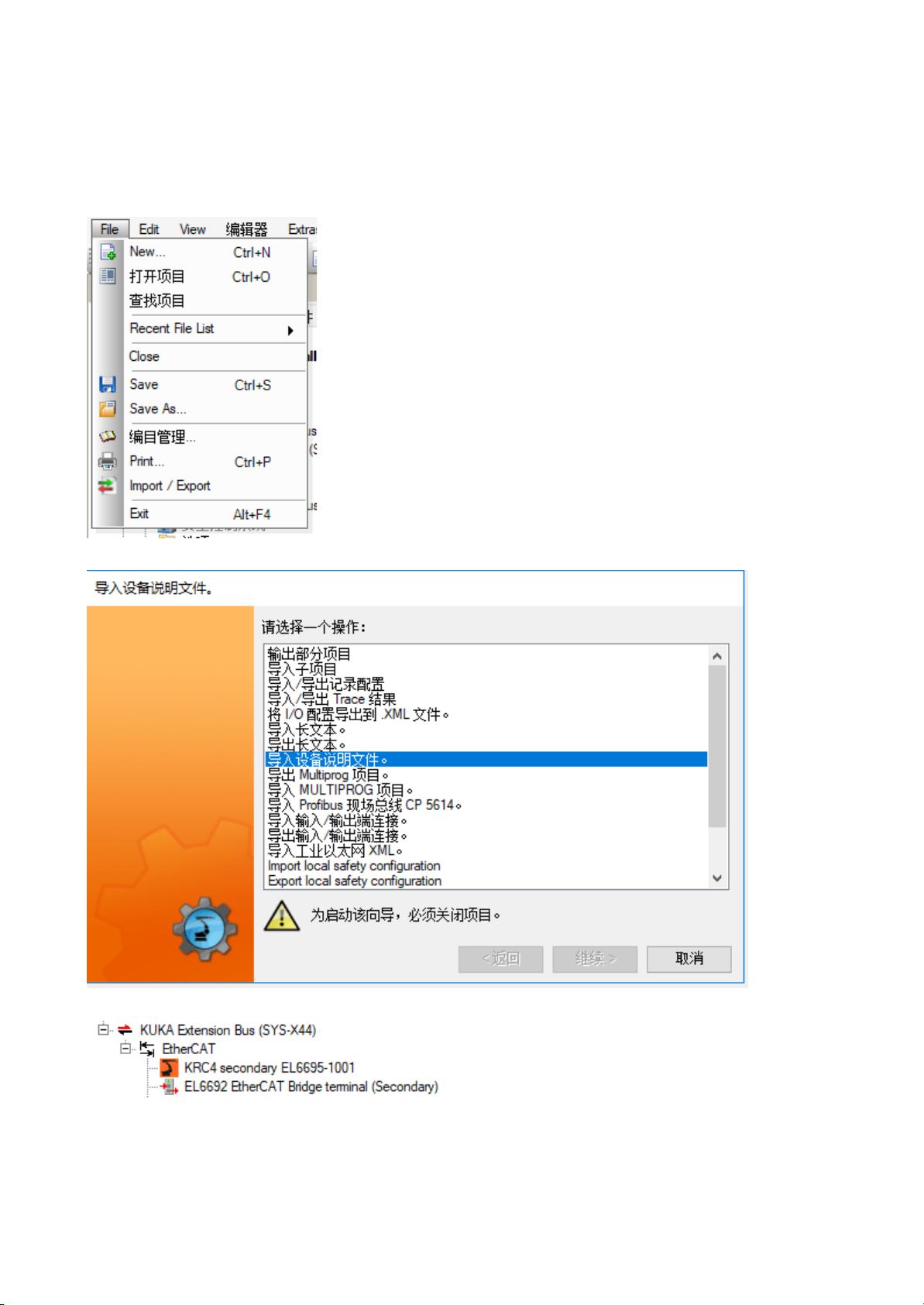
KUKA机器人使用EtherCAT通信是工业自动化领域中常见的技术应用,本文将详细解读如何配置KUKA机器人与EtherCAT通讯的相关参数,以确保机器人系统能与工业网络顺畅对接。 需要明确的是,要进行KUKA机器人EtherCAT通讯配置,我们通常使用的硬件组件包括EL6692或EL6695-1001等,而软件层面则可能需要下载相应的设备说明文件。EtherCAT是实时工业以太网技术的一种,它以高效率和低延迟的通讯能力而著称。在KUKA机器人控制系统中,通过正确配置EtherCAT通讯参数,可以实现机器人与外部设备或系统之间的高速数据交换。 配置过程可以分为以下几个步骤: 1. 添加设备说明文件:如果系统中没有所需的设备文件,需要从倍福(Beckhoff)官网下载。下载完毕后,关闭当前项目,并通过项目文件的“导入/导出”功能导入设备说明文件。这样系统就具备了与新硬件通讯的必备信息。 2. 设置总线参数:在配置过程中,需要右键点击系统总线配置选项,添加sys-x44总线。随后,在系统中右键添加EL6695-1001设备块并进行覆盖。这样可以确保新的硬件设备在系统中被正确识别。 3. 通讯IO数量设定:在配置软件中的Modules选项中,会有AllModules可供选择。在这里可以对通讯IO数量进行设定,调整输入输出模块的数量,以满足实际应用需求。 4. 奴隶设备设置(Slavesetting):在这个步骤中,主要对通讯IO的数量进行设置。需要注意的是,输入输出单位的设定,以及COUNT值的调整,这些都将直接影响到通讯协议的有效性和数据交换的准确性。 完成上述设置后,需要对机器人的IO映射进行分配,并载入机器人进行调试。IO映射分配是关键一步,它确保了机器人控制系统的每个输入输出信号正确对应外部设备的信号。 在进行这些配置操作时,可能会遇到一些OCR扫描的识别错误或漏识别的情况。在遇到识别错误时,需要仔细核对上下文,确保理解正确,并对文本进行适当的修正和通顺处理。 在配置KUKA机器人EtherCAT通讯参数的过程中,还需要注意的一点是,实际的硬件和软件环境可能会有版本或兼容性问题。因此,建议在配置之前仔细阅读KUKA和倍福官方提供的最新文档,确保使用正确的文件版本,并且遵循最新的配置指南。 当配置完成后,进行充分的测试和调试是必不可少的。在调试过程中,应检查通讯是否稳定,数据交换是否准确无误,确保机器人能在预定的控制逻辑下安全、有效地运行。通过这些细致而周密的步骤,可以确保KUKA机器人与EtherCAT的通讯达到最佳状态。
本内容试读结束,登录后可阅读更多
下载后可阅读完整内容,剩余1页未读,立即下载














评论0