
共通技术整理之 KUKA 机器人以太网 Socket 通信
共 7 页 第 1 页
KUKA 机器人以太网 Socket 通信
摘 要:本文主要讲述了 KUKA 机器人,基于以太网 Socket 通信的建立过程,通信建立后,
可与 FZ4,PLC(如 CP1L-EM),以太网模块(ETN21),PC 等设备之间通信。
关 键 词:KUKA、Socket、FZ4
整理时间:2013-04-18
整 理 人:王 龙
-------------------------------------------------------------------------------------------
一、 概述:
1.1 Socket 介绍
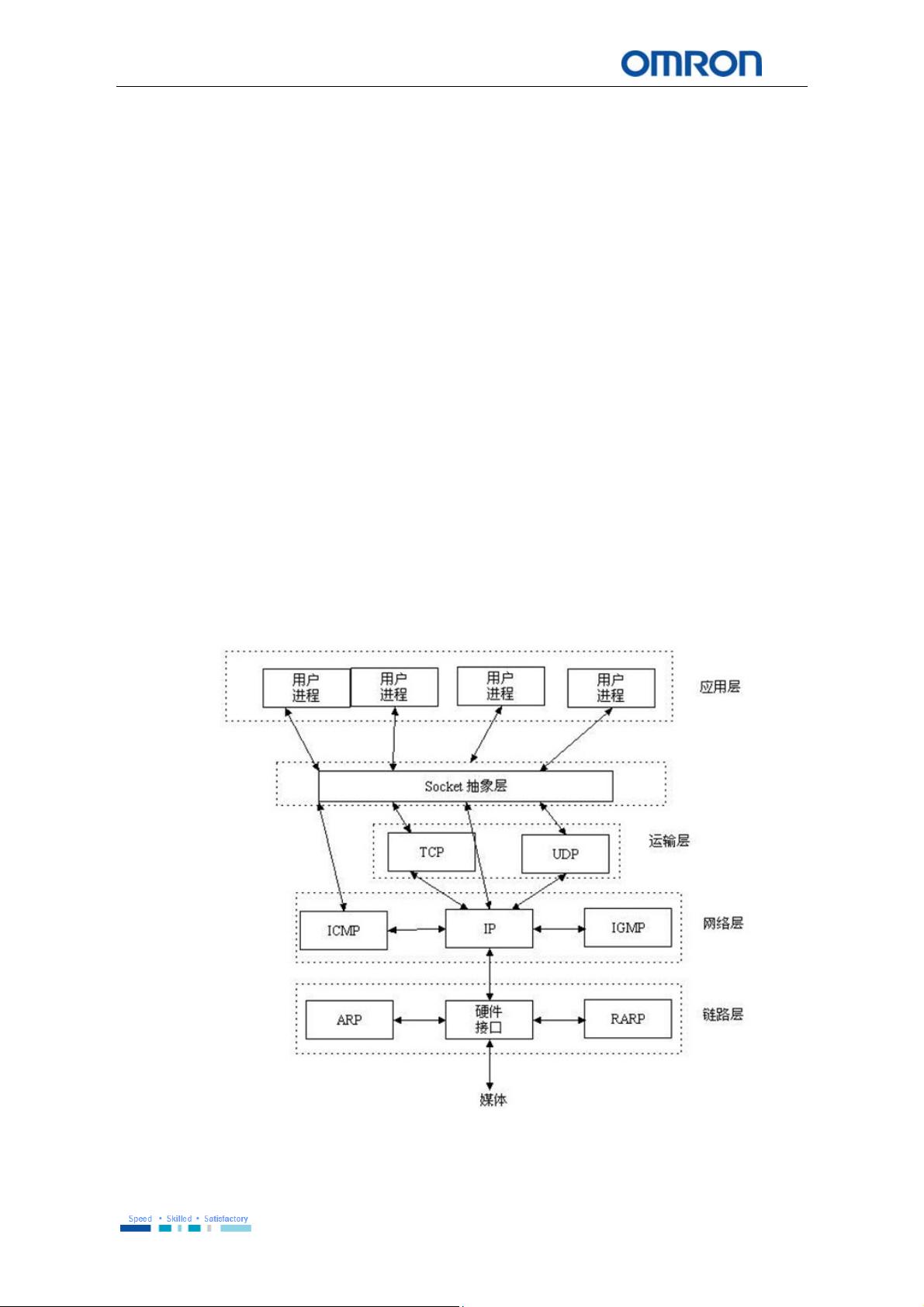
Socket 是应用层与 TCP/IP 协议族通信的中间软件抽象层,它是一组接口。在设计模式中,Socket
其实就是一个门面模式,它把复杂的 TCP/IP 协议族隐藏在 Socket 接口后面,对用户来说,一组
简单的接口就是全部,让 Socket 去组织数据,以符合指定的协议。Socket 框图如图 1 所示:
图1 Socket框图
剩余6页未读,继续阅读
资源评论

 悲酥清风12021-02-01特别好用!!!!!!!!!!!
悲酥清风12021-02-01特别好用!!!!!!!!!!! whc10272021-01-16下载了,为什么还是试读
whc10272021-01-16下载了,为什么还是试读- 叶随枫落2018-12-17用处不大,13年的文档了,不适用现在的KUKA机器人了
- ljq1196440552018-11-22还行吧 !!!!!!











