
工业机器人控制系统的组成(1)
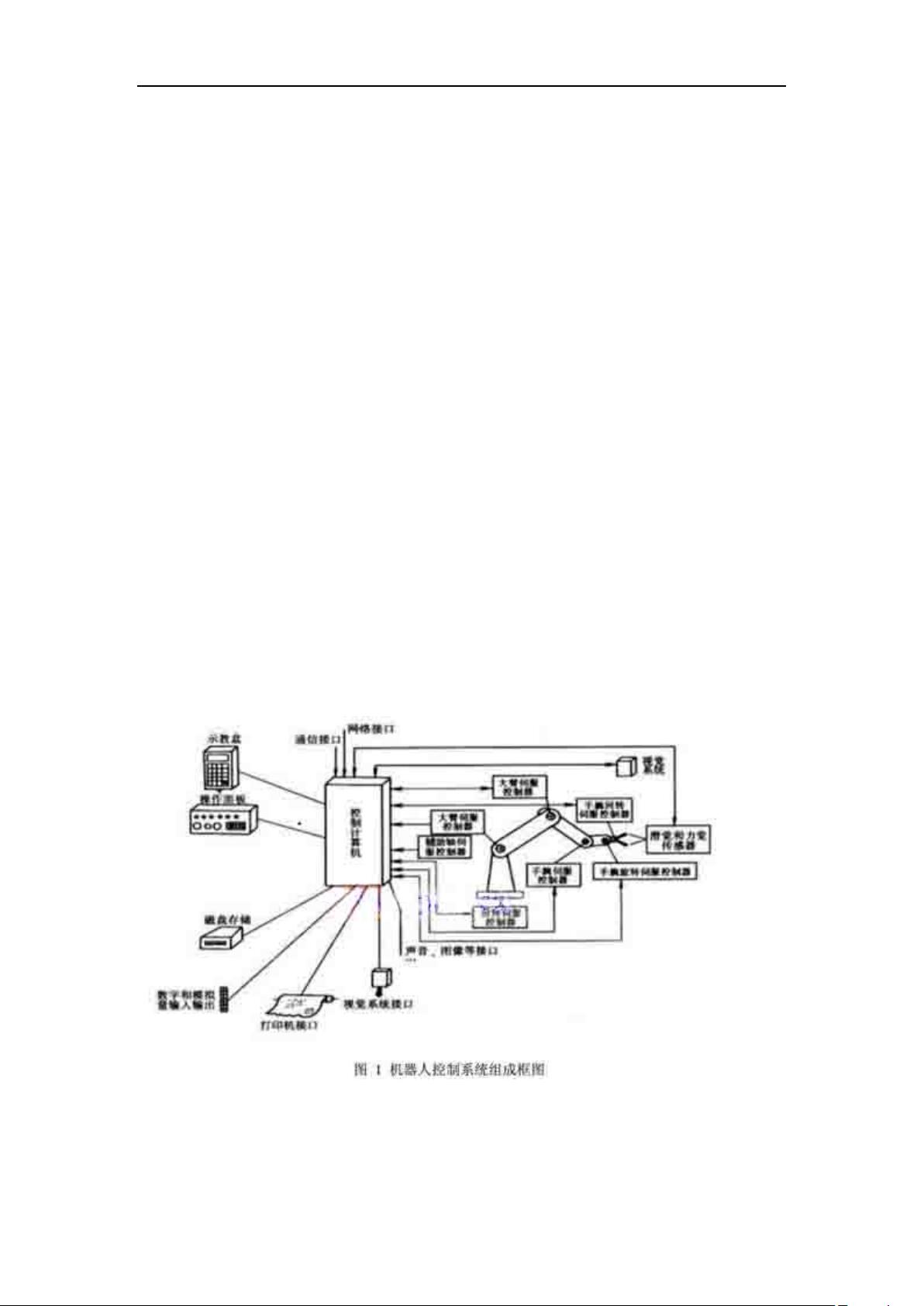
工业机器人控制系统的组成
1、控制计算机:控制系统的调度指挥机构.一般为微型机、微处理器有 32 位、
64 位等�如奔腾系列 CPU 以及其他类型 CPU。
2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥
有自己独立的 CPU 以及存储单元,与主计算机之间以串行通信方式实现信息交互。
3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。
4、硬盘和软盘存储存:储机器人工作程序的外围存储器.
5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。
6、打印机接口:记录需要输出的各种信息。
7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、
触觉和视觉传感器。
8、轴控制器:完成机器人各关节位置、速度和加速度控制。
9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。
10、通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行
接口等。
11、网络接口
1)Ethernet 接口:可通过以太网实现数台或单台机器人的直接 PC 通信,数
据传输速率高达 10Mbit/s,可直接在 PC 上用 windows 库函数进行应用程序编程
之后,支持 TCP/IP 通信协议,通过 Ethernet 接口将数据及程序装入各个机器人
控制器中。
2)Fieldbus 接口:支持多种流行的现场总线规格,如 Devicenet、
ABRemoteI/O、Interbus—s、profibus—DP、M-NET 等。
工业机器人控制系统分类
资源评论


是空空呀
- 粉丝: 192
- 资源: 3万+









最新资源
- C#ASP.NET公司年会抽奖程序源码数据库 Access源码类型 WebForm
- (源码)基于SQLite和C++的项目管理系统.zip
- 2024V免签11月份-三网免挂支付系统(集成最新的pc端监控软件)
- (源码)基于NodeJS和Fastify的硬件数据管理系统.zip
- (源码)基于Django和React的智能家居管理系统.zip
- 2022年系统架构设计师考试模拟卷(案例分析).pdf
- 数据库原理-测验.pdf
- (源码)基于C++和wxWidgets的仓库管理系统.zip
- spring-boot - spring-boot小知识点
- 全球各国汇率、短长期、政策利率数据(1914-2024.3).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


