工业机器人期末复习资料大全.doc
版权申诉
157 浏览量
2021-10-06
09:46:05
上传
评论
收藏 1.41MB DOC 举报

- -
工业机器人课件资料
一、 机器人运动学
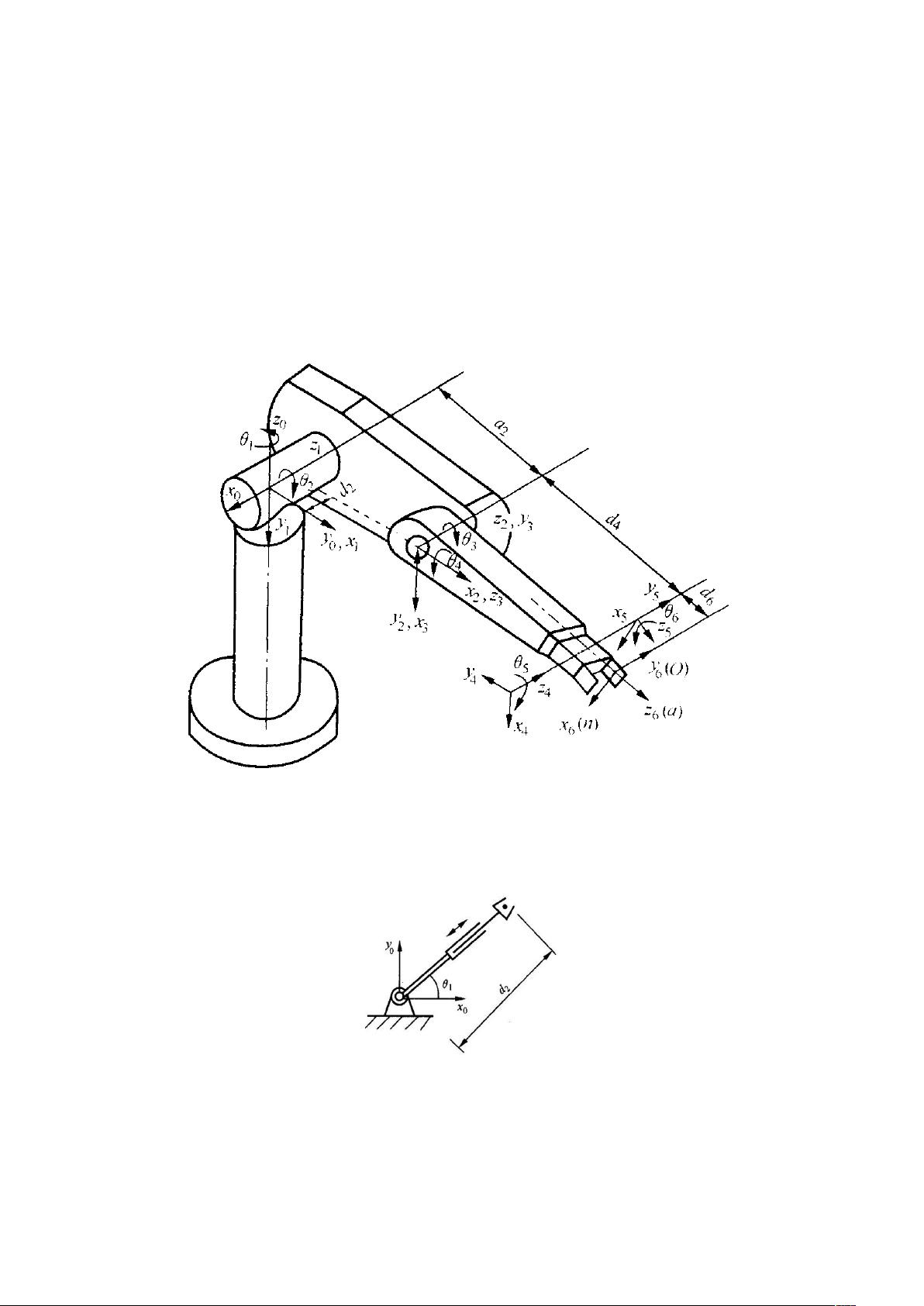
1. 关 节 型 机 器 人 构 造 如 下 图 。 关 节 变 量 值
1 2 3 4 5 6
90 , 0 , 90 , 90
,
2 2
431.8 , 149.09 ,a mm d mm
4 6
433.07 , 56.25d mm d mm
。求各关节运动变换的齐次变换矩阵
i
T
。
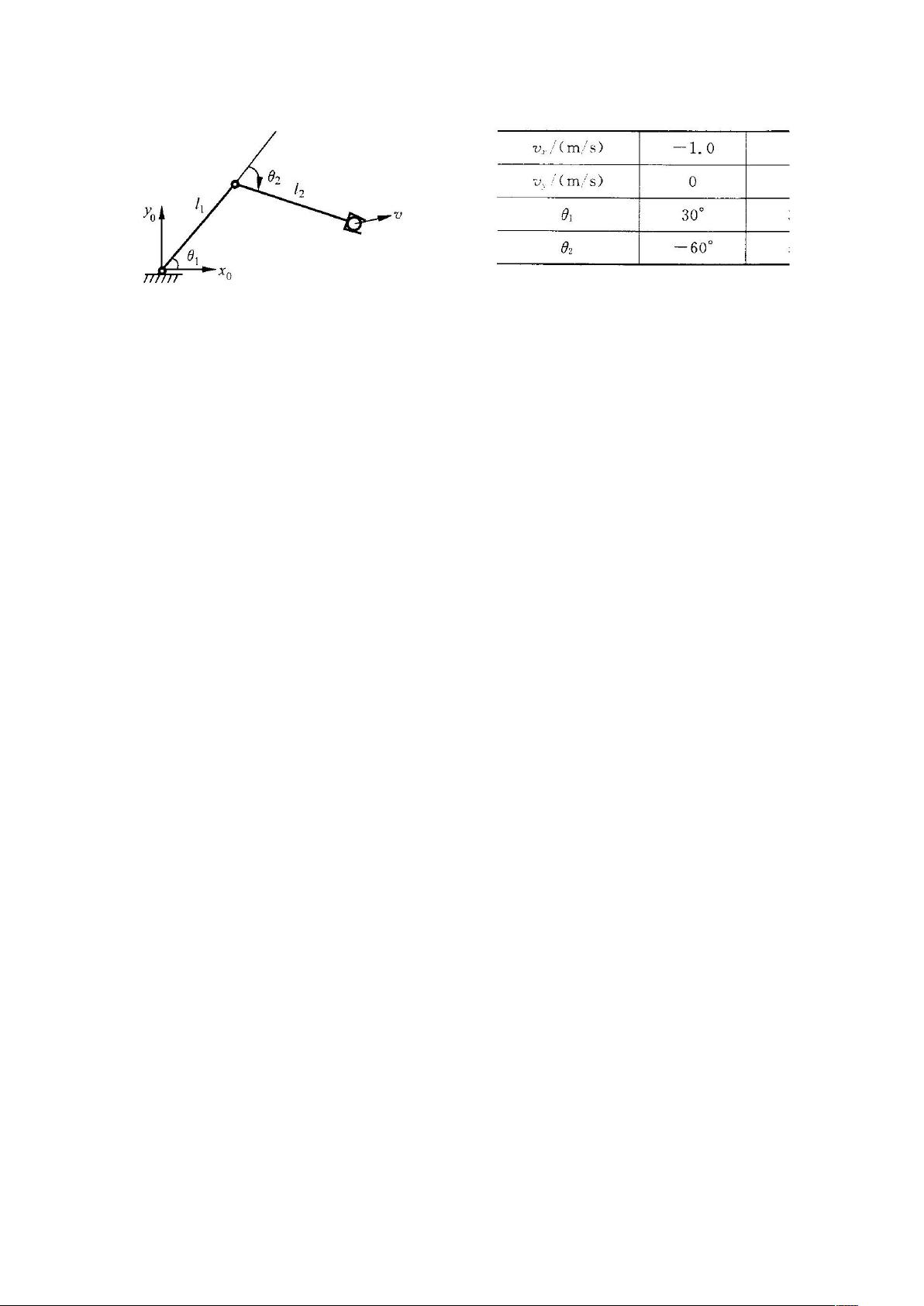
2. 如图二自由度平面机械手,手部中心坐标值为
1 1
,x y
。求该机械手运动方
程的逆解
1
及
1
d
二、 机器人动力学
1. 如图二自由度平面机械手,杆长
1 2
0.5l l m
,相关参数如下表所示。求表
中两种情况下的关节瞬时速度
1
和
2
。
- - word.zl-

剩余25页未读,继续阅读
资源评论


gjmm89
- 粉丝: 15
- 资源: 19万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- Java项目-基于Springboot+Vue的私人健身与教练预约设计与实现源码+数据库脚本+部署视频+代码讲解视频+全套软件
- Java项目-基于Springboot+Vue的乒乓球预约管理的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件
- 哆咪付在线换钱系统.zip
- pycharm的优缺点及适用场景.zip
- Java项目-基于Springboot+Vue的留守儿童爱心网站的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件
- 流行的前端框架都有哪些?详细讲解React前端框架
- JSP宠物医院信息管理系统源码.rar
- Java项目-基于Springboot+Vue的家政服务管理平台的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件
- 大数据可视化大屏页面-医院大数据展示+源代码+演示地址
- 人工智能-美国加利福尼亚州房价预测实战
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


