基于PLC机械手控制设计方案设计方案.pdf
版权申诉
15 浏览量
2022-07-12
06:24:21
上传
评论
收藏 502KB PDF 举报


关键词:机械手 伺服电机 PLC 步进电机
随着社会生产不断进步和人们生活节奏不断加快,人们对生产效率也不断提出新要
求。由于微电子技术和计算软、硬件技术的迅猛发展和现代控制理论的不断完善,使机械
手技术快速发展,其中气动机械手系统由于其介质来源简便以及不污染环境、组件价格低
廉、维修方便和系统安全可靠等特点,已渗透到工业领域的各个部门,在工业发展中占有
重要地位。本文讲述的气动机械手有气控机械手、XY 轴丝杠组、转盘机构、旋转基座等机
械部分组成。主要作用是完成机械部件的搬运工作,能放置在各种不同的生产线或物流流
水线中,使零件搬运、货物运输更快捷、便利。
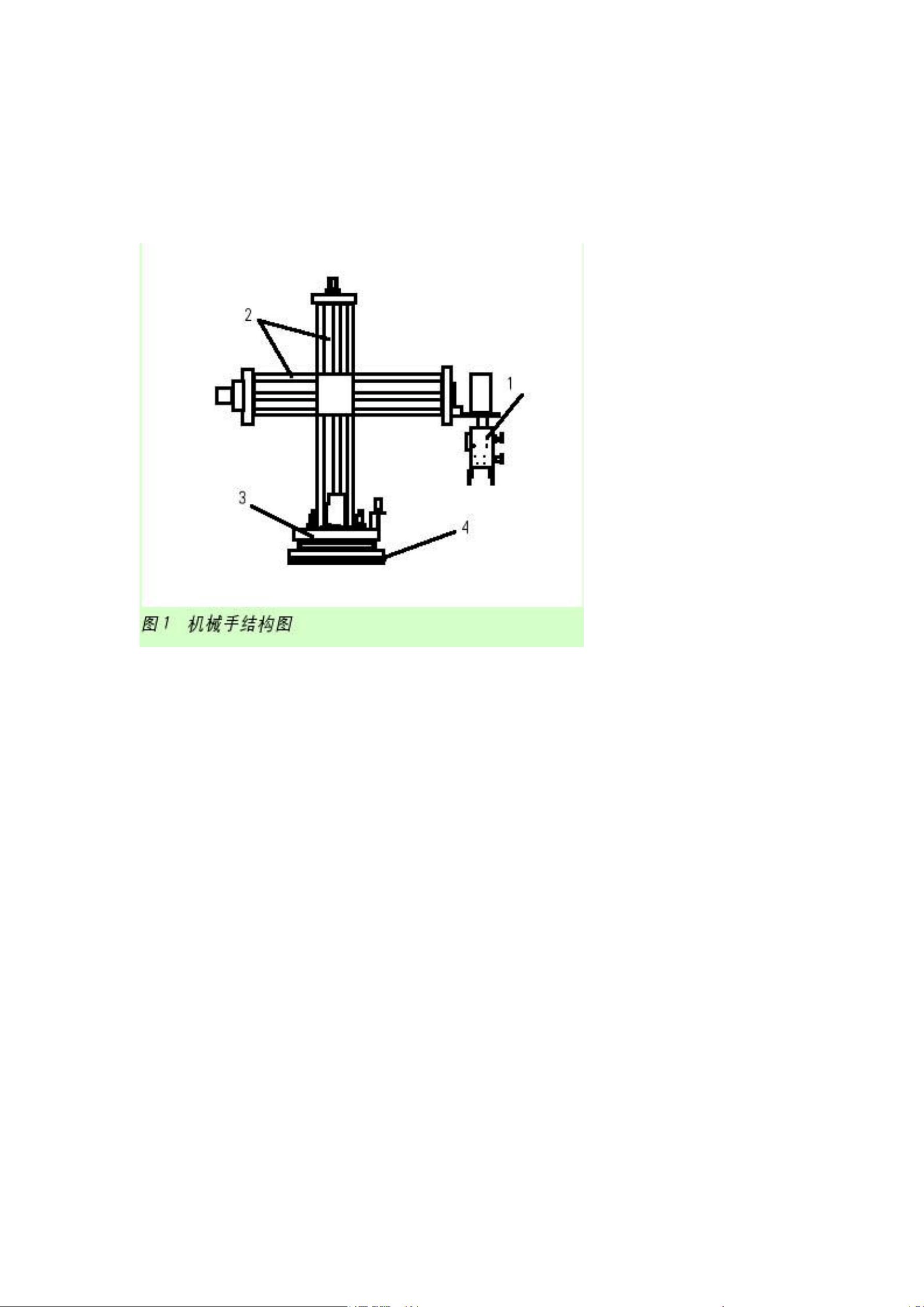
一 四轴联动简易机械手的结构及动作过程
机械手结构如下图 1 所示,有气控机械手(1)、XY 轴丝杠组(2)、转盘机构(3)、旋转基
座(4)等组成。
其运动控制方式为:(1)由伺服电机驱动可旋转角度为 360°的气控机械手(有光电传感器
确定起始 0 点);(2)由步进电机驱动丝杠组件使机械手沿 X、Y 轴移动(有 x、y 轴限位开
关);(3)可回旋 360°的转盘机构能带动机械手
及丝杠组自由旋转(其电气拖动部分由直流电动机、光电编码器、接近开关等组成);(4)旋
转基座主要支撑以上 3 部分;(5)气控机械手的张合由气压控制(充气时机械手抓紧,放气时
机械手松开)。
其工作过程为:当货物到达时,机械手系统开始动作;步进电机控制开始向下运动,
同时另一路步进电机控制横轴开始向前运动;伺服电机驱动机械手旋转到达正好抓取货物
的方位处,然后充气,机械手夹住货物。
步进电机驱动纵轴上升,另一个步进电机驱动横轴开始向前走;转盘直流电机转动使
机械手整体运动,转到货物接收处;步进电机再次驱动纵轴下降,到达指定位置后,气阀
放气,机械手松开货物;系统回位准备下一次动作。
二 控制器件选型
为达到精确控制的目的,根据市场情况,对各种关键器件选型如下:
1.步进电机及其驱动器
机械手纵轴(Y轴)和横轴(X轴)选用的是北京四通电机技术有限公司的 42BYG250C 型两
相混合式步进电机,步距角为 0.9°/1.8°,电流 1.5A。M1 是横轴电机,带动机械手机构伸、
缩;M2 是纵轴电机,带动机械手机构上升、下降。所选用的步进电机驱动器是SH-20403
型,该驱动器采用 10~40V 直流供电,H 桥双极恒相电流驱动,最大 3A 的 8 种输出电流
可选,最大 64 细分的 7 种细分模式可选,输入信号光电隔离,标准单脉冲接口,有脱机保
持功能,半密闭式机壳可适应更恶劣的工况环境,提供节能的自动半电流方式。驱动器内
部的开关电源设计,保证了驱动器可适应较宽的电压范围,用户可根据各自情况在10~
40VDC 之间选择。一般来说较高的额定电源电压有利于提高电机的高速力矩,但却会加大

剩余10页未读,继续阅读
资源评论













