"机器人的机械臂结构"
机器人的机械臂结构是机械臂系统的核心部分,涉及到机器人的运动、抓取和操作等多方面的内容。本资源为机器人的机械臂结构PPT课件,总共37页,涵盖了机械臂的承载能力、刚度、导向性能、重量轻、转动惯量小等多个方面的知识点。
一、机械臂的承载能力
机械臂的承载能力是指机械臂在运动过程中能够承载的负载能力。这包括了机械臂的强度、刚度和承载能力三个方面。机械臂的强度是指机械臂在运动过程中能够承受的最大负载能力;机械臂的刚度是指机械臂在运动过程中能够抵抗的最大变形能力;机械臂的承载能力是指机械臂在运动过程中能够承载的最大重量能力。
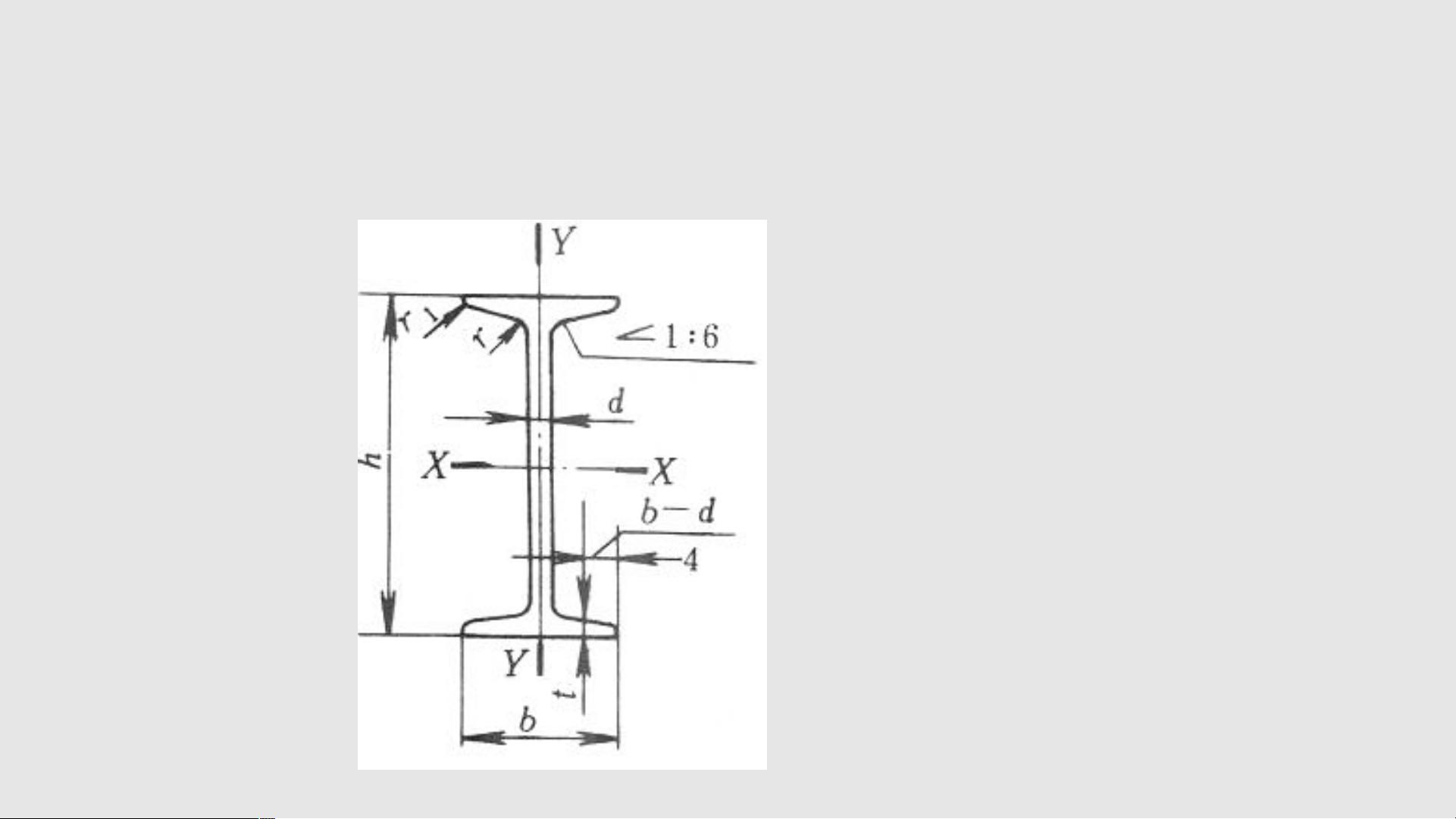
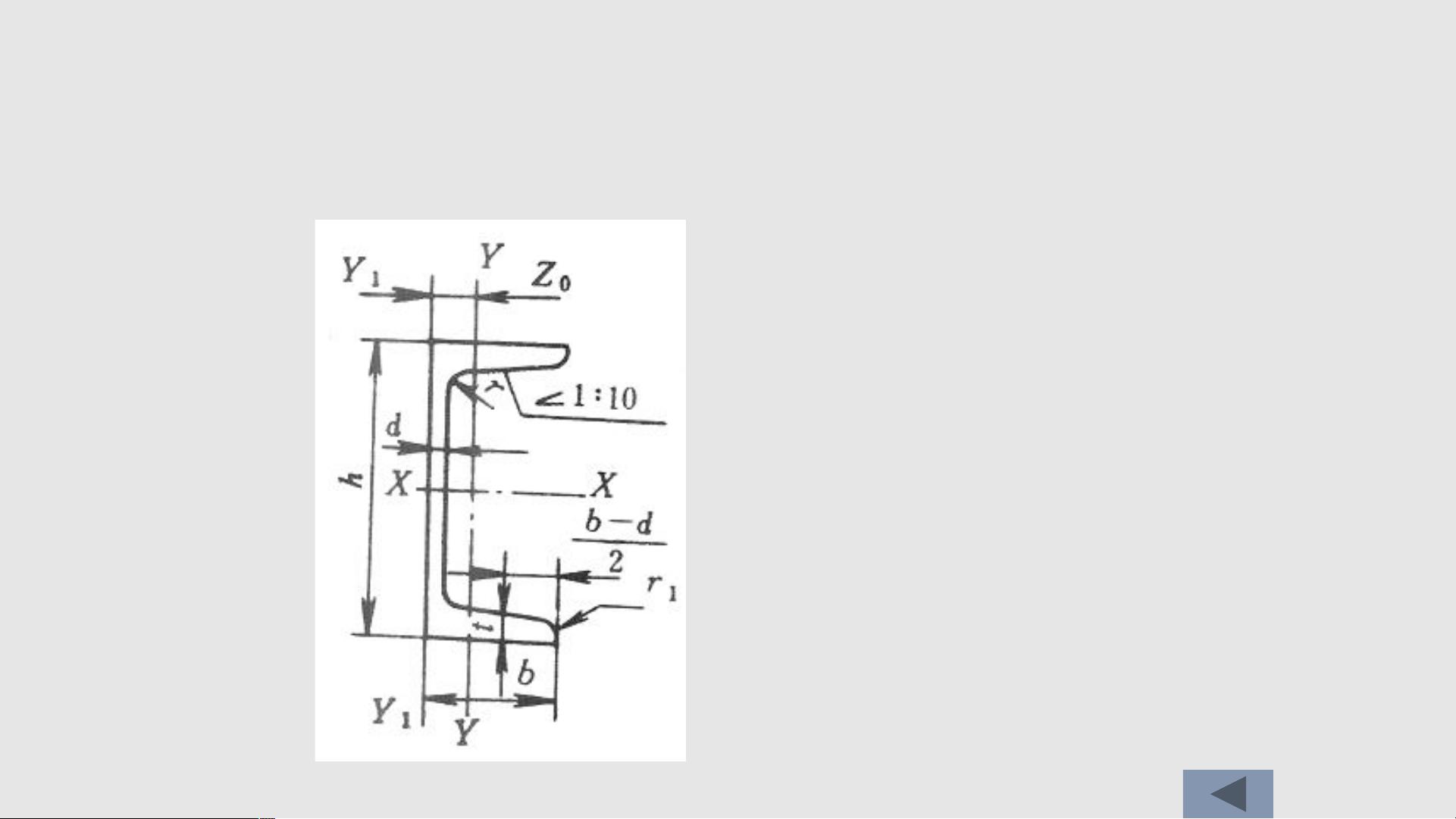
二、机械臂的刚度
机械臂的刚度是指机械臂在运动过程中能够抵抗的最大变形能力。这包括了机械臂的截面形状、材料选择和尺寸设计等多个方面。机械臂的截面形状选择合理、材料选择合适、尺寸设计合理都是提高机械臂刚度的重要因素。
三、机械臂的导向性能
机械臂的导向性能是指机械臂在运动过程中能够保持的最大精度和稳定性。这包括了机械臂的导向机构、缓冲措施等多个方面。机械臂的导向机构的选择和设计是提高机械臂导向性能的重要因素。
四、机械臂的重量轻、转动惯量小
机械臂的重量轻、转动惯量小是指机械臂在运动过程中能够减少的最大重量和转动惯量。这包括了机械臂的材料选择、尺寸设计和结构优化等多个方面。
五、机械臂的运动形式
机械臂的运动形式是指机械臂在运动过程中的运动方式。这包括了机械臂的直角坐标型、圆柱坐标型、关节型和极坐标型等多种形式。每种运动形式都有其特点和应用场景。
六、机械臂的典型结构
机械臂的典型结构是指机械臂的具体实现形式。这包括了机械臂的直线运动机构、回转运动机构和其他多种机构形式。每种机构形式都有其特点和应用场景。
机器人的机械臂结构是一个复杂的系统,涉及到多个方面的知识点。只有了解了这些知识点,才能够设计和实现一个功能强大、可靠的机械臂系统。