

视觉 SLAM 实战(一):RGB-D SLAM V2
写在前面
首先打个广告。SLAM 研究者交流 QQ 群:254787961。欢迎各路大神和小白前来交流。
看了前面三篇博文之后,是不是有同学要问:博主你扯了那么多有用没用的东西,能不能再给力一点,拿出一个我
们能实际上手玩玩的东西啊?没错,接下来我们就带着大家,实际地跑一下视觉 SLAM 里的那些经典程序,给大家一
个直观的印象因此博文就叫"视觉 SLAM 实战"啦。这些程序包括:
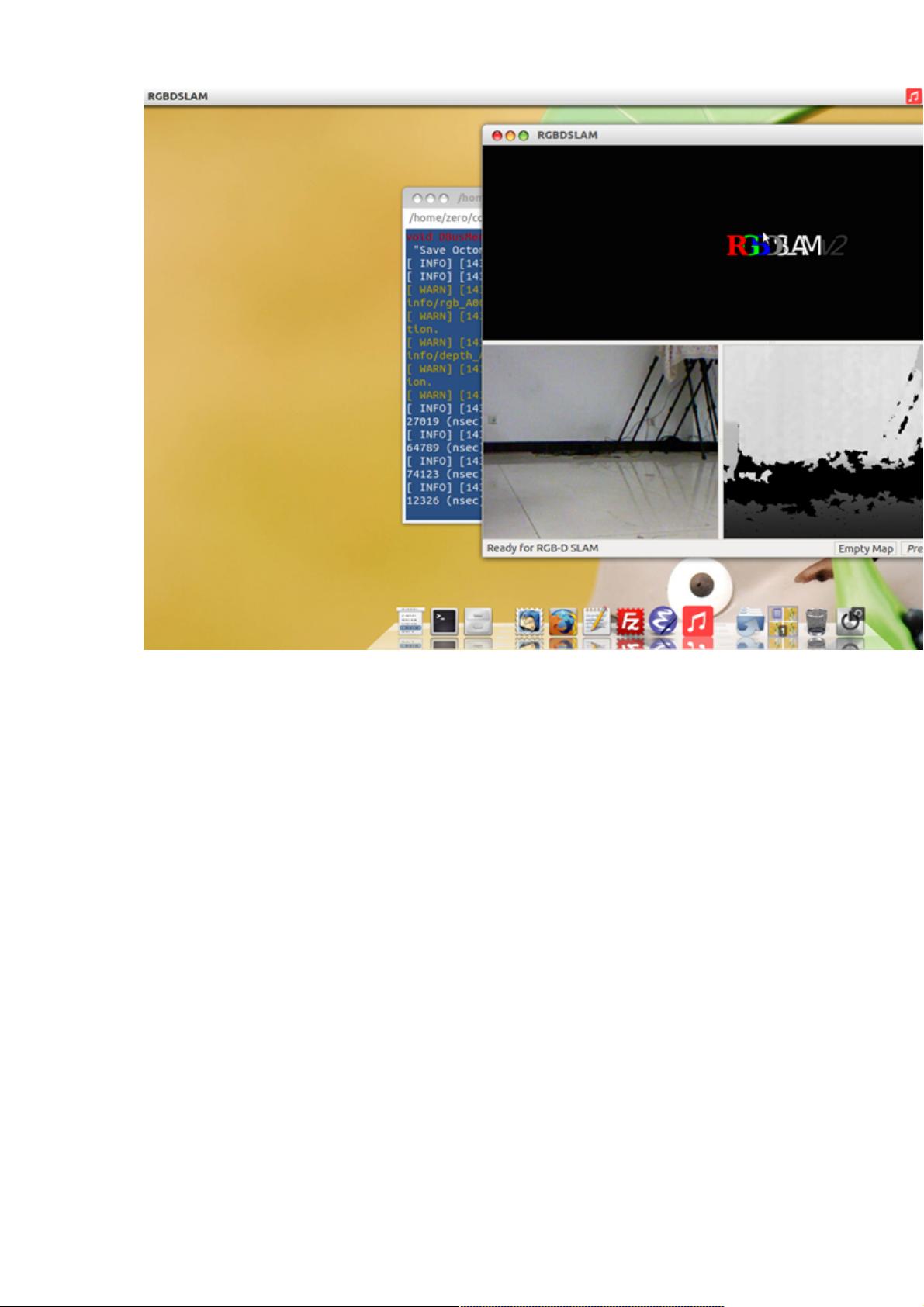
•RGBD SLAM V2
•SVO
•KinectFusion
•Orb-SLAM
如果你有什么建议,可以发我的邮件或来群里交流。当然,我是边跑边写博客,而不是一口气调通再稀里哗啦写
的。所以呢,最后跑的程序可能会和现在的计划有些出入啦。好了,废话不多说,先来介绍下实验器材。
实验器材
1. 硬件
说好的 SLAM,没有机器人怎么行?老板,先给我来三份!

剩余105页未读,继续阅读






评论0
最新资源