ROS-arduino 包安装和使用教程
ROS(Robot Operating System)是一种开源的机器人操作系统,ros-arduino 包是 ROS 中的一个库,用于将 Arduino 板连接到 ROS 系统中。下面将详细介绍 ros-arduino 包的安装和使用方法。
一、安装方法
ros-arduino 包有两种安装方法,第一种方法是使用 ros-arduino package 的简洁安装,第二种方法是使用 catkin 工具来安装。第一种方法简洁易行,但无法使用自定义消息类型;第二种方法可以使用自定义消息类型,但需要使用 catkin 工具来编译。
1.1 第一种安装方法
打开官网 http://wiki.ros.org/rosserial_arduino/Tutorials/Arduino%20IDE%20Setup,按照教程安装 ros-arduino 包。安装完成后,编译 Arduino 库文件,生成 ros-arduino 库。
1.2 第二种安装方法
使用 catkin 工具来安装 ros-arduino 包。首先创建一个新的 catkin 工作空间,接着执行 catkin_make 命令,编译 ros-arduino 库文件。使用第二种方法安装,需要使用 source catkin_ws/devel/setup.bash 命令来设置环境变量。
二、自定义消息类型
ROS 中使用消息类型来传输数据,ros-arduino 包也支持自定义消息类型。要使用自定义消息类型,需要在 catkin 工作空间中创建一个新的包,并在包中定义自定义消息类型。接着使用 catkin_make 命令编译 ros-arduino 库文件,生成 ros-arduino 库。
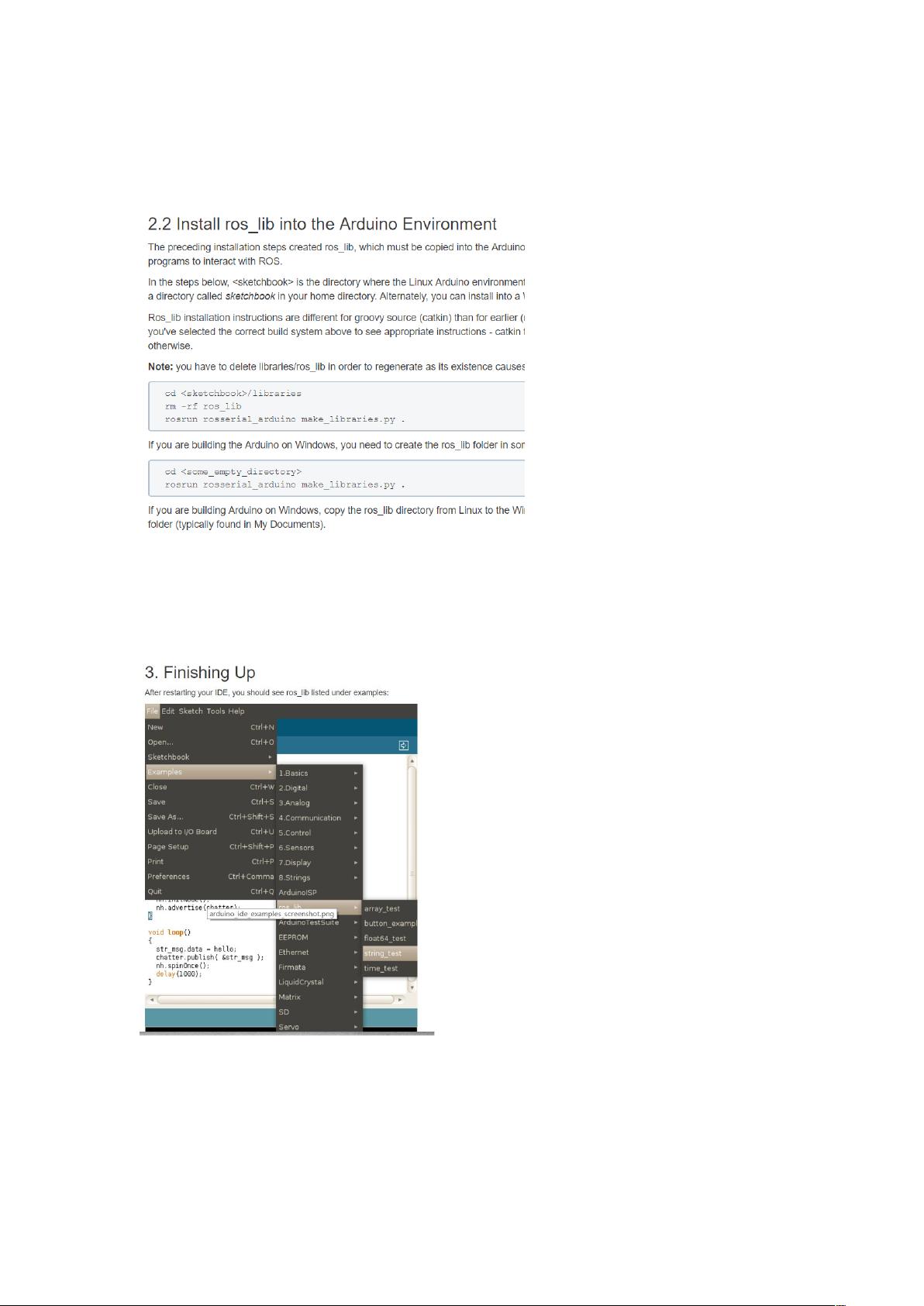
三、Arduino 代码
ros-arduino 包提供了一个示例 Arduino 代码,用于发布和订阅 ROS 消息。代码中使用了 ros::NodeHandle 类来创建 ROS 节点,ros::Publisher 类来创建发布器。发布器发布的消息类型必须是 ROS 消息类型,需要先导入消息的头文件。
四、发布器(Publisher)
ros-arduino 包提供了一个示例发布器代码,用于发布 ROS 消息。发布器使用 ros::Publisher 类来创建发布器对象,并使用 publish 方法来发布消息。
五、结论
ros-arduino 包是 ROS 中的一个库,用于将 Arduino 板连接到 ROS 系统中。安装 ros-arduino 包需要使用 catkin 工具,并可以使用自定义消息类型。 ros-arduino 包提供了示例 Arduino 代码,用于发布和订阅 ROS 消息。