机器人控制器行业研究:人形机器人行动之脑,全球本体厂商必争之地.docx
版权申诉
18 浏览量
2023-12-09
21:39:57
上传
评论
收藏 262KB DOCX 举报


机器人控制器行业研究:人形机器
人行动之脑,全球本体厂商必争之
地
1. 控制器:人形机器人之“大脑&小脑”
1.1 控制器:人形机器人核心基础
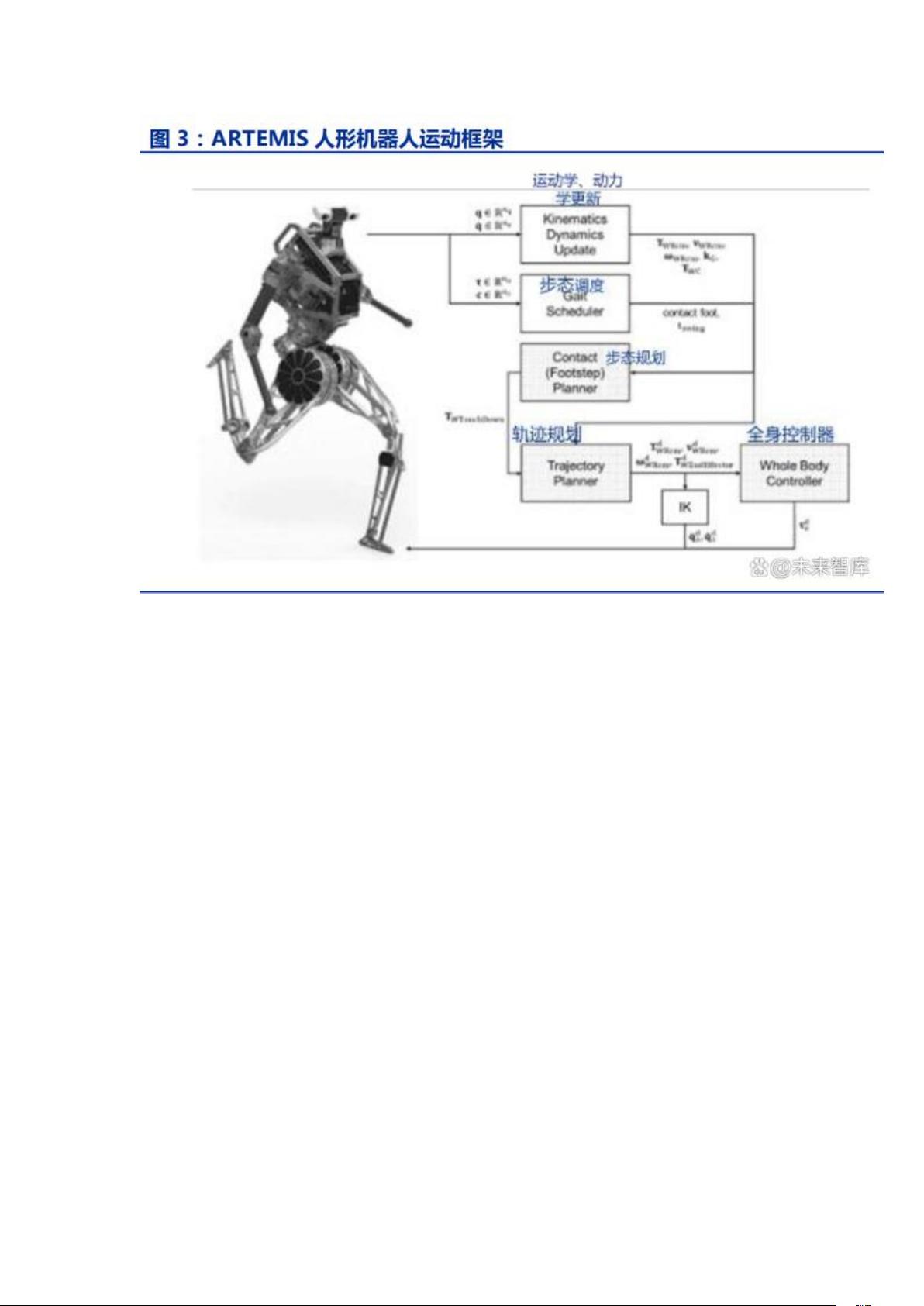
人形机器人控制器框架通常包括感知、语音交互、运动控制等层面。1)
视觉感知层: 由硬件传感器,算法软件组成,实现识别、3D 建模、定
位导航等功能;2)运动控制层: 由触觉传感器、运动控制器等硬件及
复杂的运动控制算法组成,对机器人的步态和操作行为进行实时控制;
3)交互算法层:包括语音识别、情感识别、自然语言和文本输出等。


剩余35页未读,继续阅读
资源评论













