Robotics Toolbox.pdf

需积分: 0 167 浏览量
更新于2021-01-29
收藏 848KB PDF 举报
《Matlab Robotics Toolbox》是Matlab环境中用于机器人学的一个强大工具包,它涵盖了从三维位姿描述、机器人运动学到轨迹规划和动力学等多个关键领域。本篇内容将深入讲解这些核心概念。
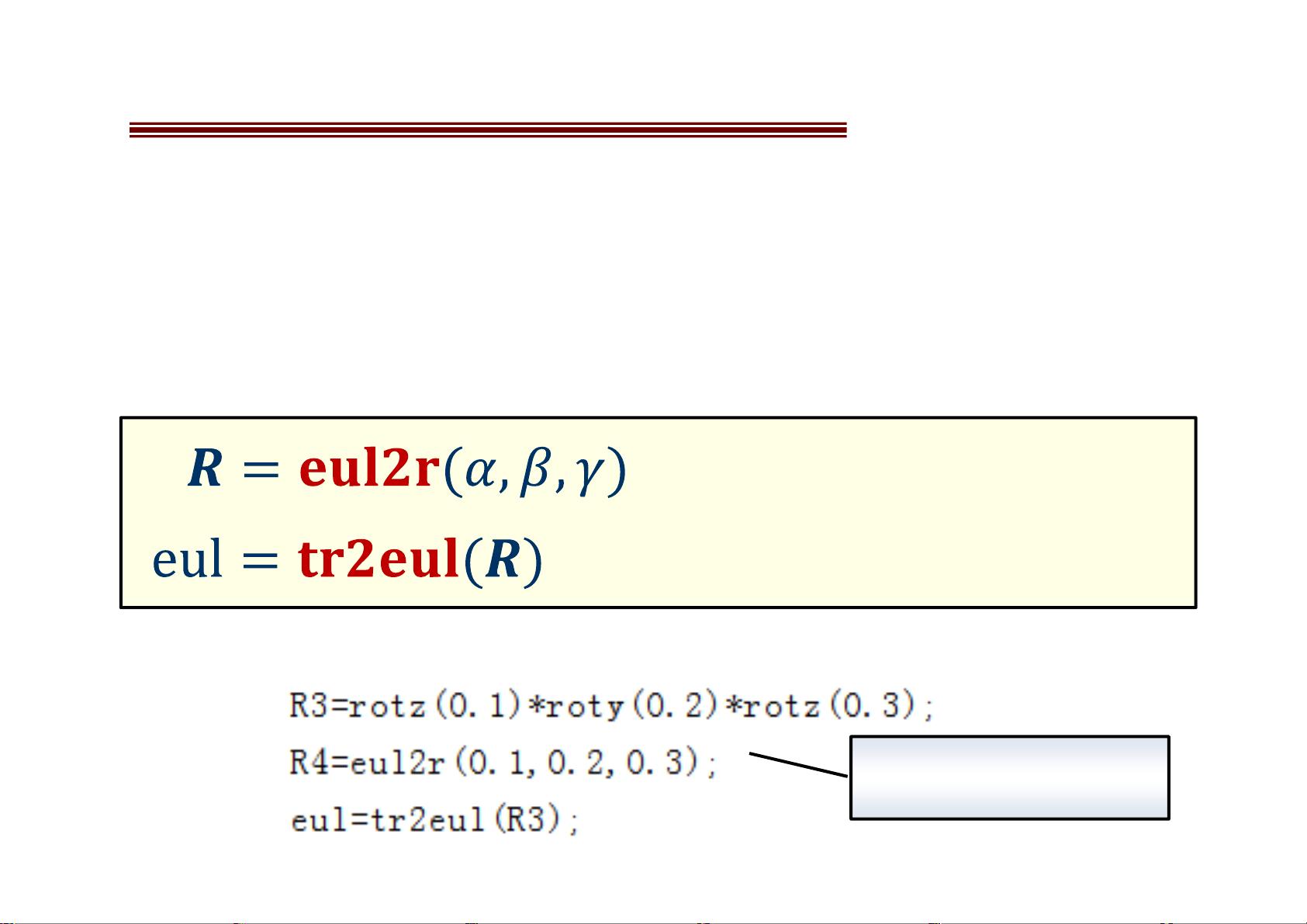
我们讨论三维位姿描述。在机器人学中,定位一个物体或机器人在空间中的位置和方向是至关重要的。常用的方法包括旋转矩阵、欧拉角、RPY(Roll-Pitch-Yaw)角以及双向量表示法。旋转矩阵提供了最全面的三维旋转描述,而欧拉角和RPY角则通过三个旋转分量简化了表示。Robotics Toolbox中,欧拉角定义为Z-Y-Z顺序,RPY角定义为X-Y-Z顺序。此外,双向量表示法利用接近矢量、方向矢量和法线矢量来定义机器人手坐标系。等效转轴和等效转角的概念则表明任何姿态都可以通过一次特定的旋转来实现。
接着,我们转向机器人运动学,这是研究机器人如何从一个位置到另一个位置的科学。D-H(Denavit-Hartenberg)参数是一种广泛使用的建模方法,它定义了相邻连杆之间的相对位置和方向。标准D-H参数假设坐标系位于连杆后端关节,而改进的D-H参数允许更灵活的坐标系定义。Robotics Toolbox允许用户创建由Links组成的机器人模型,并提供工具来画出不同关节变量下的机器人状态,同时还能生成动画和GUI界面以直观展示机器人运动。
以PUMA 560为例,它是Robotics Toolbox中预定义的一个六自由度(6DOF)机器人模型。通过列出其D-H参数表,可以计算出不同关节角度下的末端执行器位置和姿态。正向运动学解决了给定关节变量时求解末端执行器位姿的问题,而逆向运动学则是从给定的末端执行器位姿反推出所需的关节变量,这对于机器人路径规划和控制至关重要。
此外,Robotics Toolbox还支持添加工具(如夹具)和调整基座位置,这会影响末端执行器的坐标系。在解决逆向运动学问题时,对于具有球形腕关节的机器人,可能需要数值解法或解析解法来找到关节变量的精确值,因为某些情况可能不存在简单的闭式解。
Matlab Robotics Toolbox为机器人学研究和应用提供了丰富的工具和功能,使得复杂的机器人学问题可以通过Matlab的便捷接口进行建模、分析和仿真。通过理解和掌握这个工具包,工程师和研究人员能够更高效地设计、控制和优化机器人系统。
2019-09-01 上传
181 浏览量
178 浏览量
2019-01-07 上传
189 浏览量
2018-10-25 上传
157 浏览量
171 浏览量
102 浏览量
2021-01-10 上传
2019-08-07 上传
187 浏览量
189 浏览量
资源评论


我爱编程皮肤好好
- 粉丝: 8557
- 资源: 1









最新资源
- 使用Simulink搭建稳定且效果显著的有源滤波器模型:操作视频和报告资料齐备,Simulink有源滤波器模型搭建教程:稳定运行,效果显著的滤波实践,有源滤波器matlab simulink 采用si
- 极化偏转超表面之四参数化表征:Comsol求解斯托克斯参数、线偏振度、圆偏振度、偏振方位角与椭圆率角之高效方法与偏振转换效率评估,基于Comsol仿真分析的极化偏转超表面参数研究:四个斯托克斯参数与线
- brainyai-plasmo@0.86.1-内网环境「sharp问题」
- 基于模块化多电平换流器(MMC)的离网逆变工况双闭环定交流电压仿真模型技术研究与应用展示,基于模块化多电平换流器(MMC)的离网逆变工况双闭环定交流电压仿真模型设计与优化分析,模块化多电平流器(MMC
- 最新PHP短视频流量社群掘金系统源码
- 精品推荐-AUTOSAR汽车应用软件架构开发最佳实践教程合集.zip
- 基于SDE控件实现的电子病历H5
- 【javaWeb毕业设计全套】javaWeb传智播客网上书城项目源码(设计以及实现论文)
- 《发动机罩系统设计全解析:流程、断面设计、人机布置与包边涂胶要求详解》,《发动机罩系统设计全解析:流程、断面设计、人机布置与包边涂胶要求详解》,发动机罩系统设计指南讲述了发动机罩系统设计流程,典型断面
- 毕业设计javaweb物流配货项目源码
- 基于Matlab 2021a双三相永磁同步风力发电系统控制策略的仿真与模型构建:包含变流器开关控制与PWM技术的细节、双三相电机高效性与优越性及其对电网的稳定调节、机侧控制策略研究与应用,双三相永磁同
- 课堂行为数据集,使用labelimg手动标注的数据集,包含图片文件和xml文件,类别有、低头写字、低头看书、抬头听课、转头、举手
- 地理分析模型的面向服务包装系统的架构与实现
- POSIX标准文档,POSIX(Portable Operating System Interface)是一组标准,旨在确保不同操作系统之间的兼容性和可移植性
- 毕业设计javaWeb物资管理系统项目源码
- 基于COMSOL模拟的甲烷重整器模型:融合重整与水汽交换反应的内部加热管顺逆流加热系统研究,基于COMSOL模拟的甲烷重整器模型:融合重整与水汽交换反应的内部加热管顺逆流加热系统研究,甲烷重整器COM
