






1
第七届全国大学生“飞思卡尔”杯智能汽车竞赛
电磁组直立行车参考设计方案
(版本 1.0)
竞赛秘书处
2011-12-22
直立控制
速度控制
方向控制

2
目 录
一、前言 .................................................................................................................................... 4
二、原理篇 ................................................................................................................................ 6
2.1 直立行走任务分解 .............................................................................................................. 6
2.2 车模直立控制 ...................................................................................................................... 7
2.3 车模速度控制 .................................................................................................................... 11
2.4 车模方向控制 .................................................................................................................... 14
2.5 车模倾角测量 .................................................................................................................... 15
2.6 车模直立行走控制算法总图 ............................................................................................ 19
三、电路设计篇 ...................................................................................................................... 21
3.1 整体电路框图 .................................................................................................................... 21
3.2 DSC 介绍与单片机最小系统 ........................................................................................... 22
3.3 倾角传感器电路 ................................................................................................................ 25
3.4 电机驱动电路 .................................................................................................................... 27
3.5 速度传感器 ........................................................................................................................ 28
3.6 电磁线检测电路 ................................................................................................................ 29
四、机械设计篇 ...................................................................................................................... 30
4.1 车模简化改装 .................................................................................................................... 30
4.2 传感器安装 ........................................................................................................................ 31
4.3 注意事项 ............................................................................................................................ 33
五、软件编写与调试篇 .......................................................................................................... 34
5.1 软件功能与框架 ................................................................................................................ 34
5.2 DSC 的资源配置 ............................................................................................................... 37
5.3 主要算法及其实现 ............................................................................................................ 38
5.4 程序调试与参数整定 ........................................................................................................ 46
5.5 现场运行测试 .................................................................................................................... 47
六、结束语 .............................................................................................................................. 47
附录: ...................................................................................................................................... 48

3

4
一、前言
为了提高全国大学生智能汽车竞赛创新性和趣味性,激发高校学生参与比赛的兴趣,
提高学生的动手能力、创新能力和接受挑战能力,智能汽车竞赛组委会将电磁组比赛规
定为车模直立行走(如图 1.1 所示),其它两个组别的车模行走方式保持不变。
图 1.1 电磁组车模直立运行模式
车模直立行走比赛是要求仿照两轮自平衡电动车的行进模式,让车模以两个后轮
驱动进行直立行走。近年来,两轮自平衡电动车以其行走灵活、便利、节能等特点得到
了很大的发展。国内外有很多这方面的研究,也有相应的产品。在电磁组比赛中,利用
了原来 C 型车模双后轮驱动的特点,实现两轮自平衡行走。相对于传统的四轮行走的车
模竞赛模式,车模直立行走在车体检测、控制算法等方面提出了更高的要求。为了能够
帮助参赛同学尽快制作车模参加比赛,竞赛秘书处编写了 C 型车模直立行走的参考设计
方案。参赛队员可以在此基础上,进一步改进硬件和软件方案,提高竞赛水平。
为了适应初学者,方案介绍过程中,尽可能减少公式推导,使用通俗科学的语言介
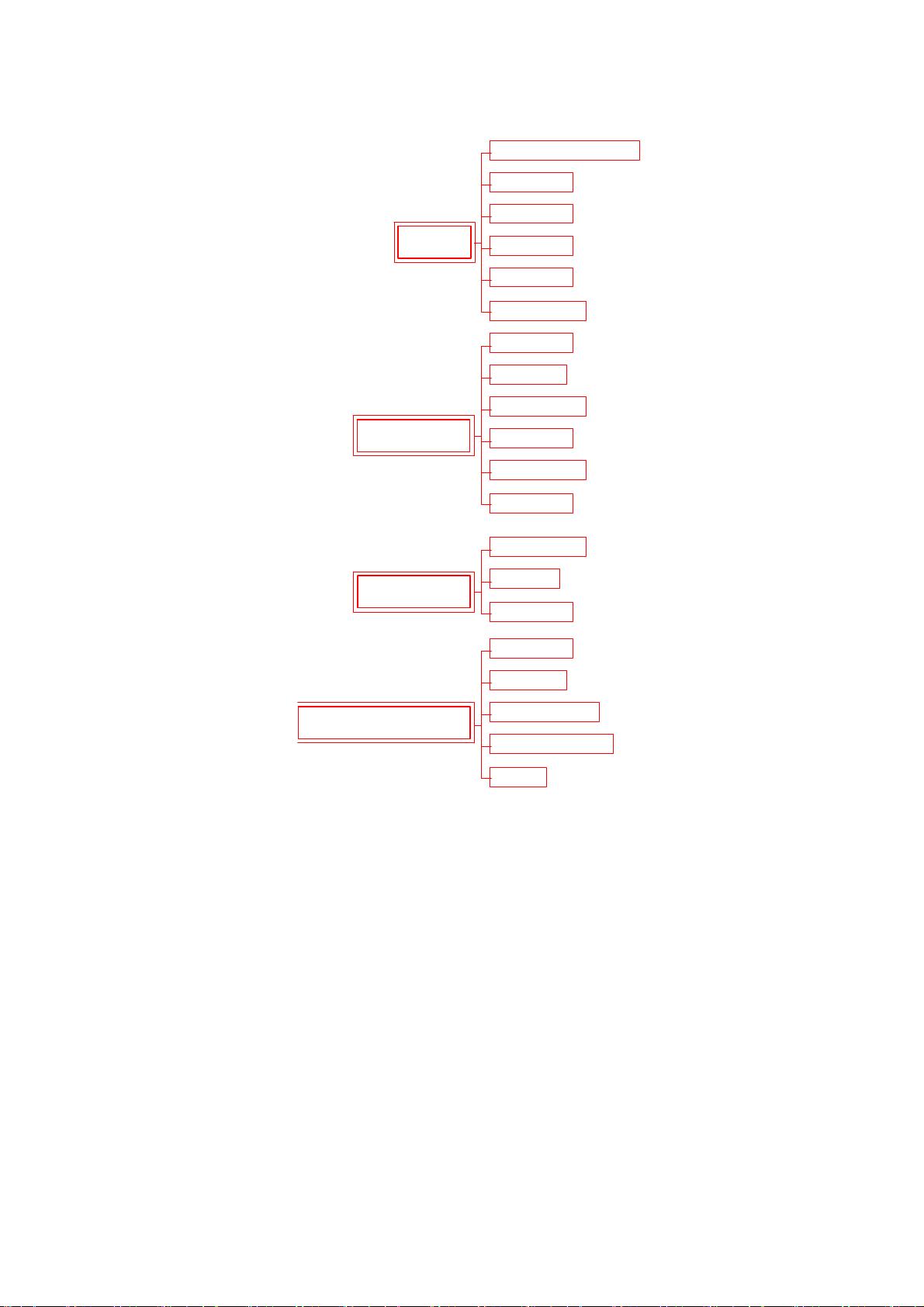
绍控制原理和方法,给出 C 型车模制作过程中的核心环节。本文的主要内容如图 1.2 所
示。
5
图 1.2 参考设计方案内容
参考设计方案经过了实际验证测试,车模测试运行视频请在竞赛网站上下载。
参考设计方案最后附录中给出了用于下载资料的相关网站。
原理篇
电路设计篇
机械设计篇
软件编写与调试篇
电磁组直立行走任务分解
车模直立控制
车模速度控制
车模方向控制
车模倾角测量
控制算法总框图
整体电路框图
DSC最小系统
倾角传感器电路
电机驱动电路
速度传感器电路
电磁检测电路
车模简化与修改
传感器安装
其它注意事项
软件功能框架
DSC资源配置
主要算法以及实现
程序调试与参数整定
运行测试

















评论2