
Webots+ROS学习记录学习记录(3)——四轮移动机器人四轮移动机器人
Webots+ROS学习记录学习记录(3)——四轮移动机器人四轮移动机器人
一、四轮移动机器人模型一、四轮移动机器人模型
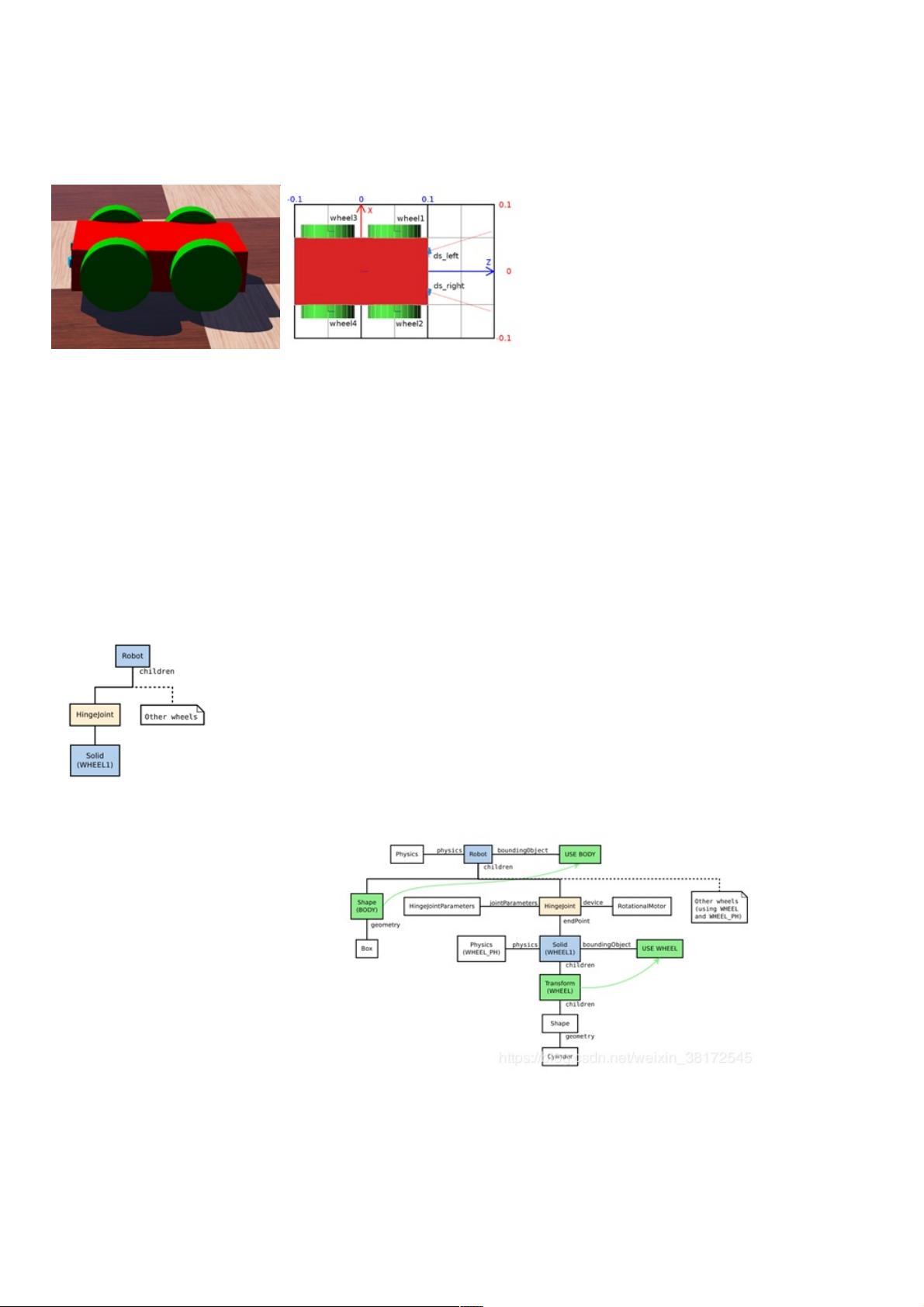
本教程的目的是从头创建你的第一个机器人。这个机器人将由一个身体、四个轮子和两个距离传感器组成。结果如图1所示。
图2从俯视图显示了机器人的坐标关系。
二、步骤二、步骤
a) 新建一个仿真新建一个仿真
新建一个工程,确保你的新world里面有地面、墙壁和照明(ground, the walls and the lighting)保存world文件为
4_wheels_robot.wbt。
在给出创建机器人模型的规则之前,需要一些定义。
包含Solid节点及其所有派生节点的集合称为solid节点。类似的定义也适用于Device, Robot, Joint 和 Motor节点。机器人模型
的主要结构是一个实体节点连接在一起的树。Joint节点用于在其父节点和子节点之间添加一个(或多个)自由度(DOF)。Joint节
点的直接父节点和子节点都是实节点。从Joint派生的节点允许在链接的solid节点之间创建不同类型的约束。
在我们的例子中:机器人有4自由度,对应于车轮电机。它可以分为五个实体节点:身体和四个轮子。
b) 将机器人分成实体节点将机器人分成实体节点
在场景树的最后,添加一个具有四个HingeJoints节点的Robot节点,该节点有一个Solid子节点
向robot节点添加包含Box geometry的shape节点。将形状的颜色设置为红色。使用该形状还可以定义机器人节点的
boundingObject字段。Box的尺寸是(0.1,0.05,0.2)。为机器人添加一个Physics节点。图4表示定义机器人的所有节点。到目前
为止,只实现了根robot节点的直接子节点。
c) 创建创建HingeJoints
添加一个HingeJointParameters节点。车轮的初始位置由实体节点的translation和rotation确定。而旋转原点(anchor)和旋转轴
(axis)则由可选的铰节点的HingeJointParameters子节点定义。对于第一个轮子,实体平移应定义为(0.06,0,0.05),以便车身与
轮子之间有相对间隙。HingeJointParameters-anchor也应定义为(0.06,0,0.05)来定义旋转原点(相对于body)。最
后,HingeJointParameters-
axis在我们的例子中它沿着x轴,设为所以(1,0,0)。
完成缺失的节点,得到与图4所示相同的结构。将Transform节点Rotation设置为(0,0,1,Pi/2)。圆柱体的半径为0.04,高度为
资源评论


weixin_38655347
- 粉丝: 9
- 资源: 919









最新资源
- YOLO算法-禾本科杂草数据集-4760张图像带标签.zip
- YOLO算法-无人机俯视视角动物数据集-10140张图像带标签-斑马-骆驼-大象-牛-羊.zip
- YOLO算法-挖掘机与火焰数据集-8129张图像带标签-挖掘机.zip
- YOLO算法-塑料数据集-3029张图像带标签-塑料制品-白色塑料.zip
- PyKDL库源码,编译安装PyKDL库
- YOLO算法-红外探测数据集-10573张图像带标签-小型车-人-无人机.zip
- 基于 C++和TCP和WebSocket的即时通信系统设计与实现(源码+文档)
- 电商管理系统项目源代码全套技术资料.zip
- 全国2022年04月高等教育自学考试02326操作系统试题及答案
- YOLO算法-垃圾数据集-3818张图像带标签-可口可乐-百事可乐.zip
- YOLO算法-瓶纸盒合并数据集-1317张图像带标签-纸张-纸箱-瓶子.zip
- YOLO算法-杂草检测项目数据集-3970张图像带标签-杂草.zip
- YOLO算法-杂草检测项目数据集-3853张图像带标签-杂草.zip
- YOLO算法-挖掘机与火焰数据集-7735张图像带标签-挖掘机.zip
- 文旅项目源代码全套技术资料.zip
- YOLO算法-罐头和瓶子数据集-1531张图像带标签-鲜奶-瓶子.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


