
ROS学习笔记之学习笔记之——多机器人探索环境多机器人探索环境
本博文是基于这个ROS软件包(https://github.com/hrnr/m-explore)的学习笔记
目录目录
multi robot exploration
nav_msgs/OccupancyGrid
map_msgs/OccupancyGridUpdate
move_base
multirobot_map_merge
参考资料
multi robot exploration
这个包名为explore_lite,采用greedy frontier-based exploration。当节点运行时,机器人会贪婪地探索环境,直到找不到边界为止。就是这些机器人会一直把整个区域都探索完。如
下图所示
explore_lite不会创建自己的costmap,这使得配置更容易,效率更高(资源更少)。节点简单的订阅nav_msgs/OccupancyGrid 这个消息,机器人运动的命令也直接传到move_base
Node can do frontier filtering (边界滤波) and can operate even on non-inflated maps(非膨胀地图). Goal blacklisting (黑名单) allows to deal with places inaccessible (无法
到达的地方) for robot.
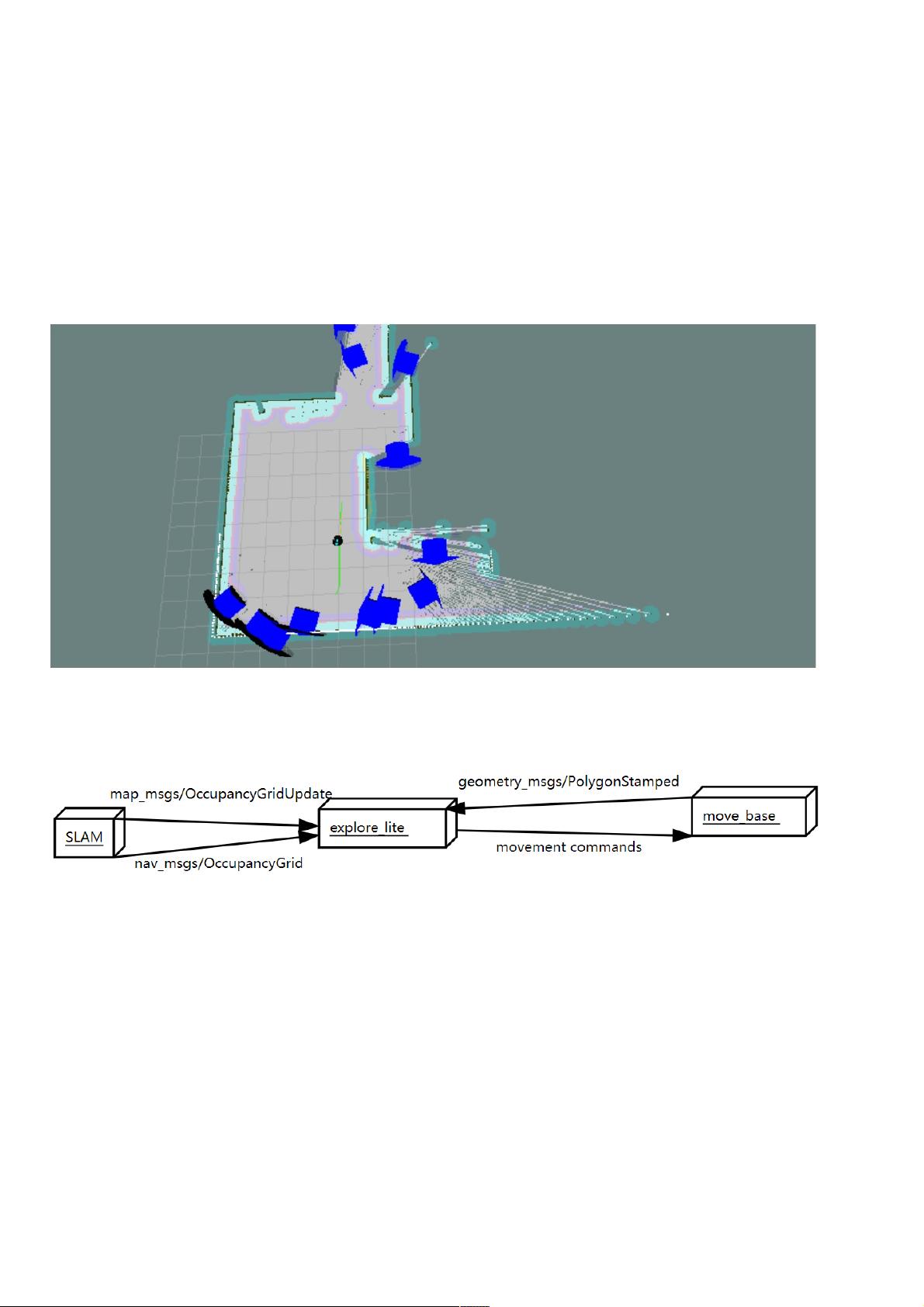
下面介绍一下这个功能包的结构。如下图所示。explore_lite采用move_base节点来导航
explore_lite通过订阅nav_msgs/OccupancyGrid和map_msgs/OccupancyGridUpdate的消息来构建地图,确认地图的边界。可以使用由move_base产生的
costmap(/global_costmap/costmap)或者由SLAM构建的地图。
nav_msgs/OccupancyGrid
http://docs.ros.org/api/nav_msgs/html/msg/OccupancyGrid.html
资源评论













