
通俗易懂!视觉通俗易懂!视觉slam第六部分第六部分——旋转向量,欧拉角旋转向量,欧拉角
矩阵表示方式还有很多缺点:
1.SO(3) 的旋转矩阵有九个量,但一次旋转只有三个自由度。因此这种表达方式是冗余的。同理,变换矩阵用十六个量表达了六自由度的变换。
2. 旋转矩阵自身带有约束:它必须是个正交矩阵,且行列式为 1。变换矩阵也是如此。当我们想要估计或优化一个旋转矩阵/变换矩阵时,这些约束会使
得求解变得更困难。
对于坐标系的旋转,我们知道,任意旋转都可以用一个旋转轴和一个旋转角来刻画。于是,我们可以使用一个向量,其方向与旋转轴一致,而长度等于
旋转角。这种向量,称为旋转向量(或轴角,Axis-Angle)。这种表示法只需一个三维向量即可描述旋转。同样,对于变换矩阵,我们使用一个旋转向
量和一个平移向量即可表达一次变换。这时的维数正好是六维。
旋转向量就是李代数。剩下的问题是,旋转向量和旋转矩阵之间是如何转换的呢?假设有一个旋转轴为 n,角度为 θ 的旋转,显然,它对应的旋转向量
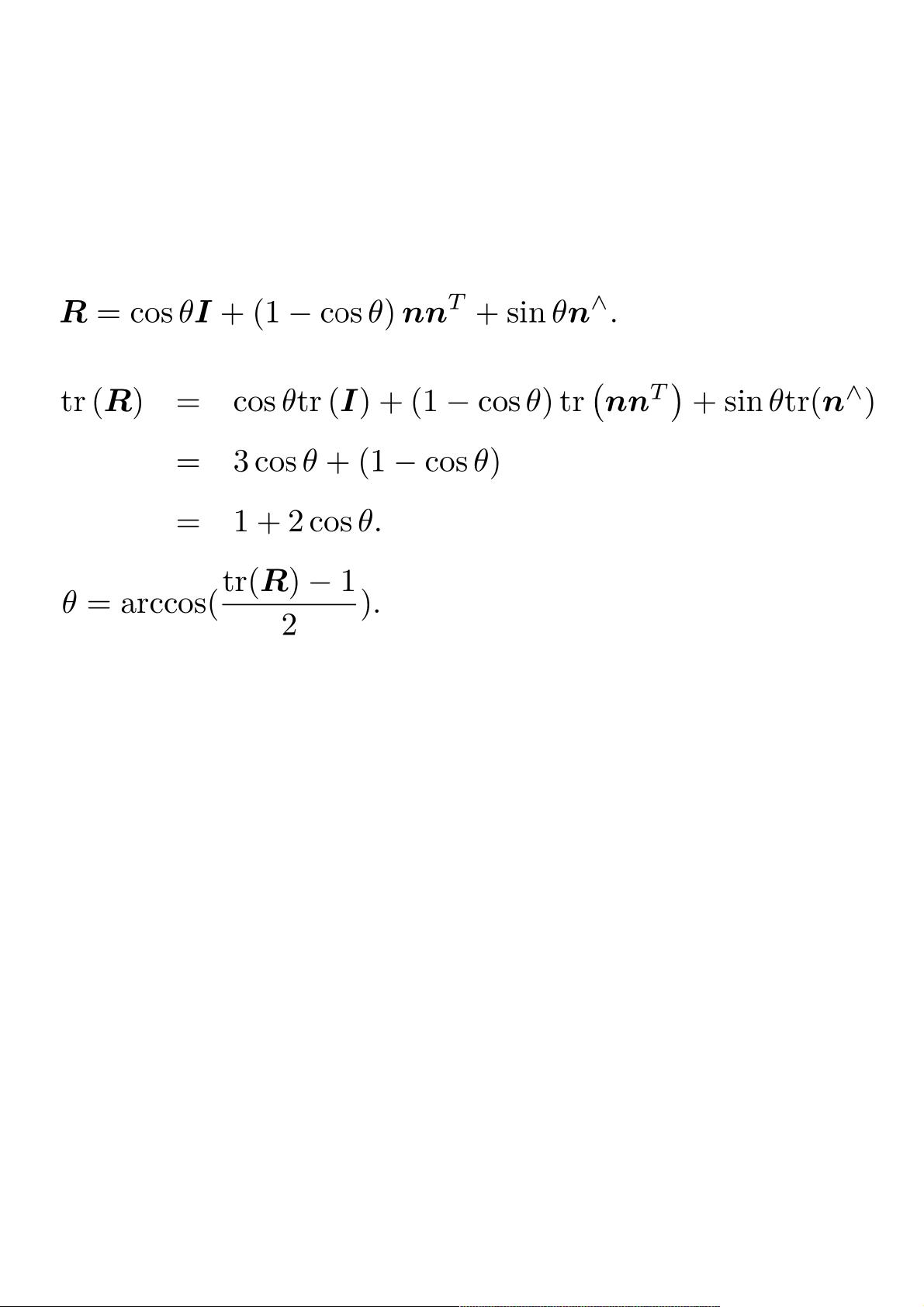
为 θn。由旋转向量到旋转矩阵的过程由罗德里格斯公式(Rodrigues’s Formula )表明,由于推导过程比较复杂,我们不作描述,只给出转换的结果 :
符号∧是向量到反对称的转换符。反之,我们也可以计算从一个旋转矩阵到旋转向量的转换。对于转角 θ,有(因为这里n为单位向量):
关于转轴 n,由于旋转轴上的向量在旋转后不发生改变,说明Rn = n.
因此,转轴 n 是矩阵 R 特征值 1 对应的特征向量。求解此方程,再归一化,就得到了旋转轴。
欧拉角:欧拉角:
旋转矩阵、旋转向量,虽然它们能描述旋转,但对我们人类是非常不直观的。当我们看到一个旋转矩阵或旋转向量时,很难想象出来这个旋转究竟是什
么样的。当它们变换时,我们也不知道物体是向哪个方向在转动。而欧拉角则提供了一种非常直观的方式来描述旋转——它使用了三个分离的转角,把
一个旋转分解成三次绕不同轴的旋转。
欧拉角当中比较常用的一种,便是用“偏航-俯仰-滚转”(yaw-pitch-roll)三个角度来描述一个旋转的。欧拉角的一个重大缺点是会碰到著名的万向锁问题
(Gimbal Lock x ):在俯仰角为±90 ◦ 时,第一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度(由三次旋转变成了两次旋转)。这
被称为奇异性问题,在其他形式的欧拉角中也同样存在。理论上可以证明,只要我们想用三个实数来表达三维旋转时,都会不可避免地碰到奇异性问
题。
作者:cold星辰
资源评论

 2301_806346982024-09-14感谢大佬分享的资源,对我启发很大,给了我新的灵感。
2301_806346982024-09-14感谢大佬分享的资源,对我启发很大,给了我新的灵感。











