
Relative depth estimation with an uncalibrated
camera for image refocus
Qiuyan Tao
1,2
, Jianing Li
1,2
, Lianghao Wang
1,2
, Ming Zhang
1,2
1
College of Information Science and Electronic Engineering, Zhejiang University, Hangzhou, China
2
Zhejiang Provincial Key Laboratory of Information Network Technology, Hangzhou, China
Abstract—Built-in post refocus applications begin to appear in
cameras of new phone models. Most of them rely on dual or even
customized cameras. In this paper, we proposed a solution of post
refocus using a single uncalibrated cellphone camera. The input is
a short video clip with minor camera movement, which is
commonly caused by nature shaking of hand. After using feature
matching to find a reference plane, the parallax of multiple frames
will be revised based on the transformation of reference plane and
a factorization method is used to recover the relative depth map.
Finally, plausible refocus images can be obtained according to the
relative depth map. Our solution has no reliance on any specialized
lens and can generate adjustable refocus effect, in both focal depth
and the degree of out-of-focus.
Keywords—refocus; relative depth; cellphone camera
I. INTRODUCTION
A shallow DOF (Depth-of-Field) will blur everything but the
subjects in focal range, therefore it’s often used to highlight the
subject out of unimportant environment. A set of shallow DOF
results generated by our refocus algorithm is presented in Fig. 1.
Using lens of high F-number can attain the goal, so it’s easy for
DLSR cameras with changeable lens to create such effect.
However, the lens of cellphone camera is fixed and choosing a
large aperture may cause technology and cost problems.
Therefore, most cellphone cameras have a middle aperture, by
which the photos took have a fair DOF.
There’re some work already done to imitate light-field
camera’s function to post refocus by ordinary lens. Some
researchers use stereo images as input and extend their
experience of solving stereo matching problem to image refocus.
Google camera app also launched a “Lens Blur” feature recently
[1]. It’s inspired by a fast bilateral filtering algorithm to format
the per-pixel depth estimation problem into “bilateral-space”,
which results in clear edge in the depth map and fast computing
speed [2]. The input is a pair of stereo images, so it can only
operate on few cellphones with dual cameras. Dung T. et al [3]
also used stereo as input, and proposed a hybrid tree-based
method to solve stereo matching for refocus. It combined
information about superpixel segmentation, edge and pixel
similarity to get general pixel cost. Lumia series [4] take several
images that focus on different depth as input. After processing
all images of various focal depth to get a depth map, user can
This work was supported in part by the National Natural Science
Foundation of China (Grant No. 61271338, 61401390), the Zhejiang Provincial
Natural Science Foundation of China (Grant No. LQ14F010005), and the Open
Projects Program of National Laboratory of Pattern Recognition of China
(Grant No. 201306308).
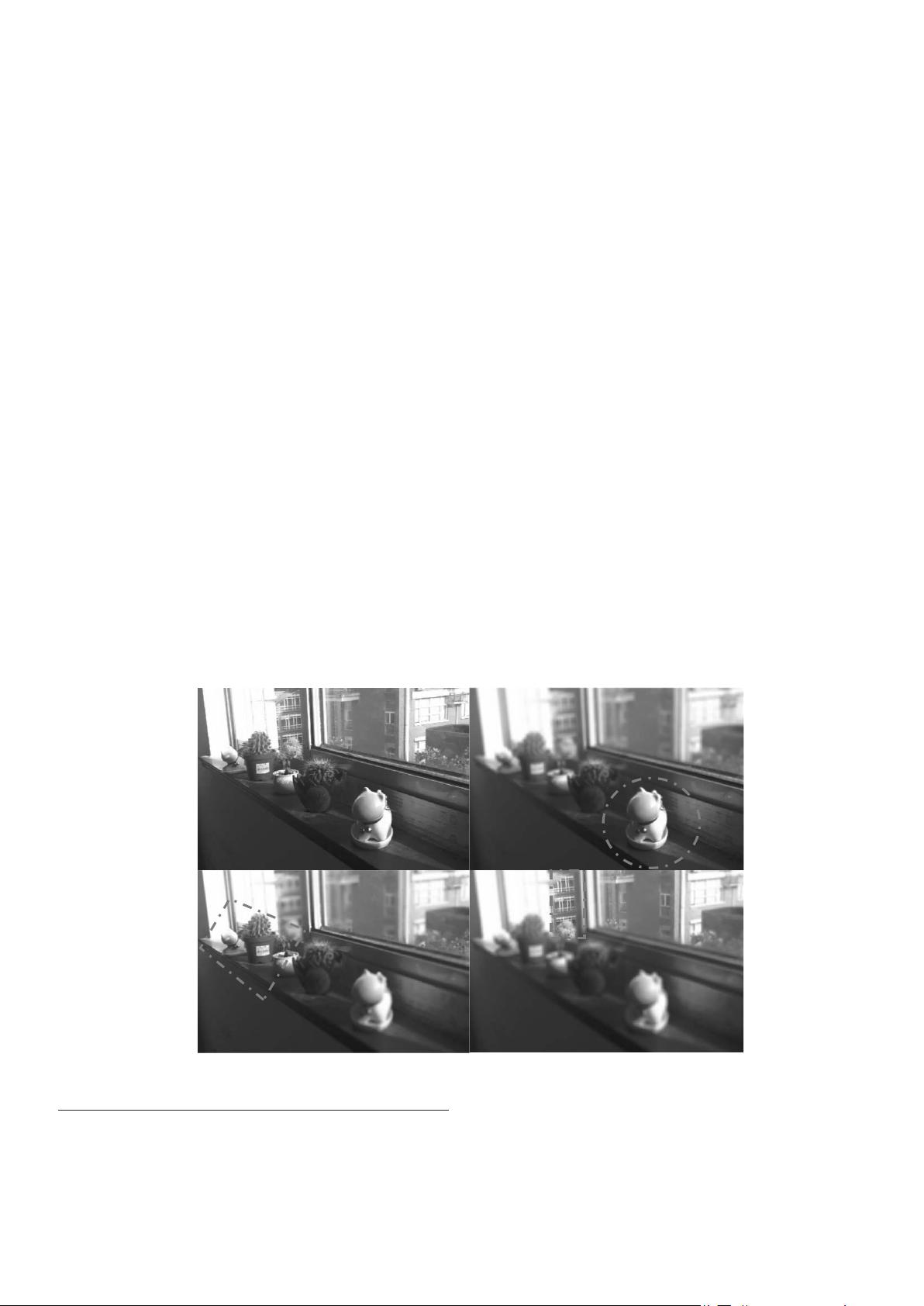
Fig. 1. One of the input images and refocus results of our algorithm. Refocused regions are outlined. Top left:
First frame of the video, all in focus. Top right: Refocus on the first cat. Bottom left: Refocus on the fourth
cactus. Bottom right: Refocus on the building outside of the window.
978-1-4673-7687-7/15/$31.00 ©2015 IEEE

weixin_38572979
- 粉丝: 4
- 资源: 932









最新资源
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端基于GenericApp的无线收发例程.zip
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端无线收发控制LED灯.zip
- zigbee CC2530无线自组网协议栈系统代码实现协调器与终端之间的数据相互收发.zip
- zigbee CC2530无线自组网协议栈系统代码实现协议捕捉与数据分析.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集光敏传感器并发给协调器串口输出.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集气体传感器值发给协调器并串口打印.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集人体红外热释电传感器发送给协调器并串口输出.zip
- 功能完善的小说CMS系统项目全套技术资料.zip
- zigbee CC2530无线自组网协议栈系统代码实现终端采集温度传感器DS18B20发送给协调器并串口打印输出.zip
- 食物营养分析-java-基于 SpringBoot 的食物营养分析与推荐网站的设计与实现(毕业论文)
- zigbee CC2530无线自组网协议栈系统代码实现终端采集温湿度传感器DHT11并发给协调器并串口打印输出.zip
- zigbee CC2530无线自组网协议栈系统的RemoTI源码.zip
- zigbee CC2530无线自组网协议栈系统之新建自己的Zstack工程模板(协调器、终端、路由器).zip
- 宠物救助及领养-java-基于springBoot的宠物救助及领养平台的设计与实现(毕业论文)
- 从基础到高级:Rust语言教程与编程实战
- 城市公交查询-java-基于springBoot的城市公交查询系统设计与实现(毕业论文)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0