abb机器人外部tcp定义方法-ABB机器人与外部通讯你会哪些?.pdf
版权申诉

abb机器⼈外部tcp定义⽅法_ABB机器⼈与外部通讯你会哪
些?
ABB机器⼈
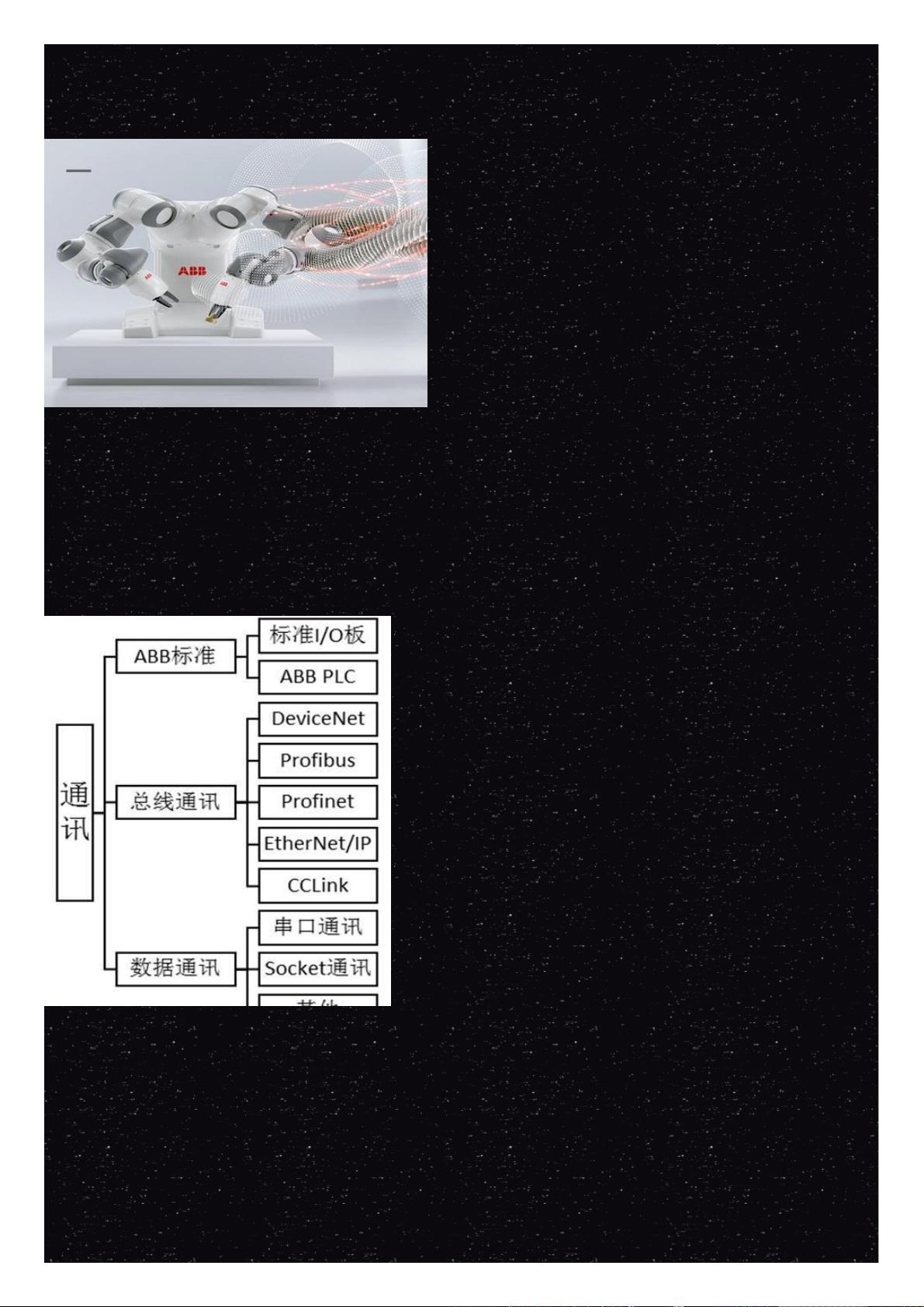
机器⼈I/O是 Input/Output的缩写,即输⼊输出端⼝,机器⼈可通过I/O与外部设备进⾏交互,例如:数字量输⼊:各种开关信号反馈,如
按钮开关,转换开关,接近开关等;传感器信号反馈,如光电传感器,光纤传感器;还有接触器,继电器触点信号反馈;另外还有触摸屏⾥
的开关信号反馈。数字量输出:控制各种继电器线圈,如接触器,继电器,电磁阀;控制各种指⽰类信号,如指⽰灯,蜂鸣器。
ABB机器⼈的标准I/O板的输⼊输出都是PNP类型。
通过本章节的学习,⼤家可以认识ABB机器⼈常⽤的标准I/O板卡,学会信号的配置⽅法及监控与操作的⽅式,掌握Profibus总线配置⽅法
和Profinet总线配置⽅法,及学会系统输⼊输出和可编程按键的使⽤。
ABB标准I/O板DSQC651和Profibus-DP为例
这⾥设置为”4”,表⽰机器⼈与PLC通讯⽀持32个数字输⼊和32个数字输出。该参数允许设置的最⼤值为64,意味着最多⽀持512个数
字输⼊和512个数字输出。从站机器⼈端Profinet地址参数设置见表“1”设置机器⼈端Profinet通讯的输⼊输出字节⼤⼩。
资源评论

 weixin_379346482023-03-16资源值得借鉴的内容很多,那就浅学一下吧,值得下载!
weixin_379346482023-03-16资源值得借鉴的内容很多,那就浅学一下吧,值得下载!

是空空呀
- 粉丝: 168
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











