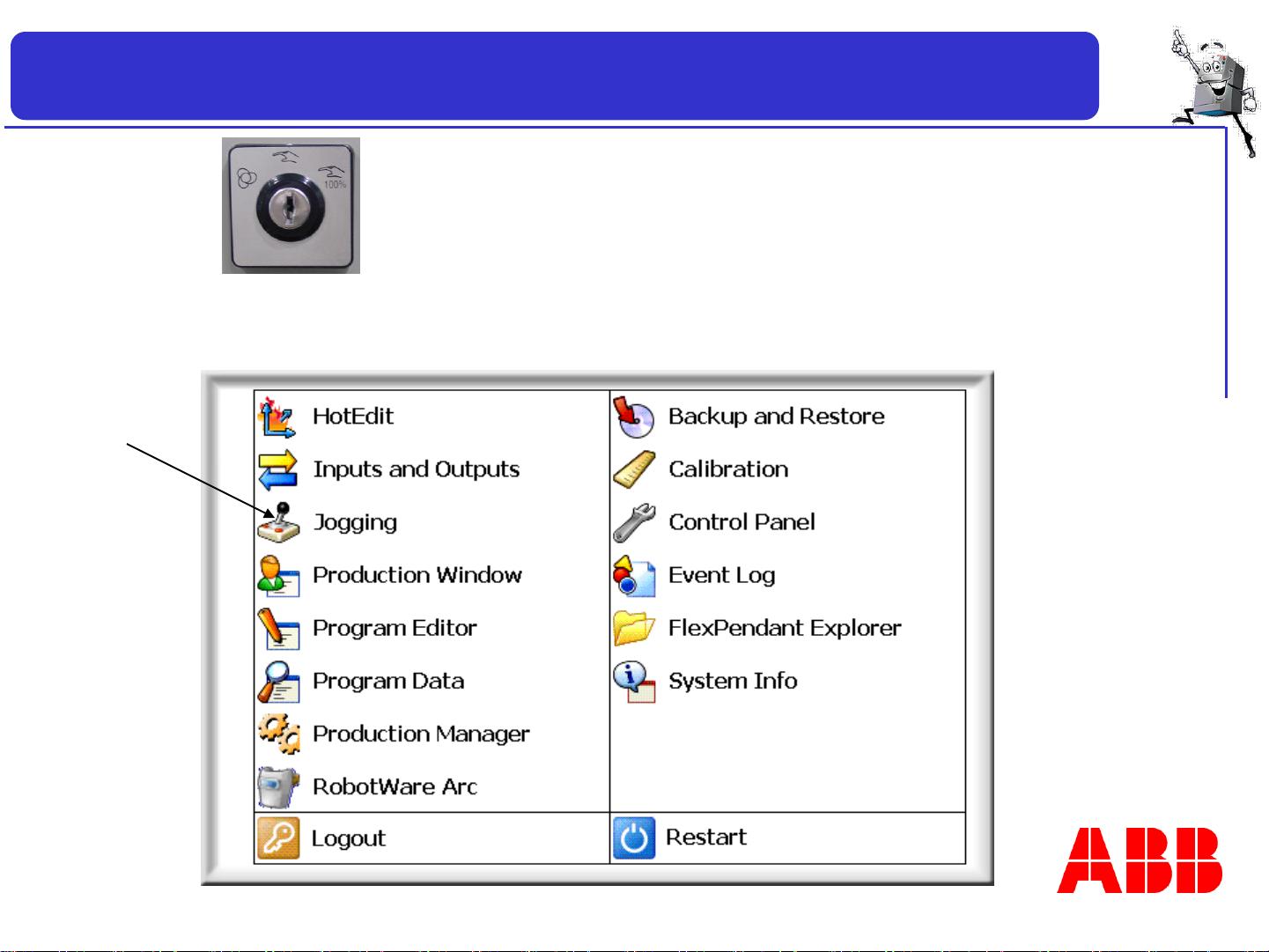
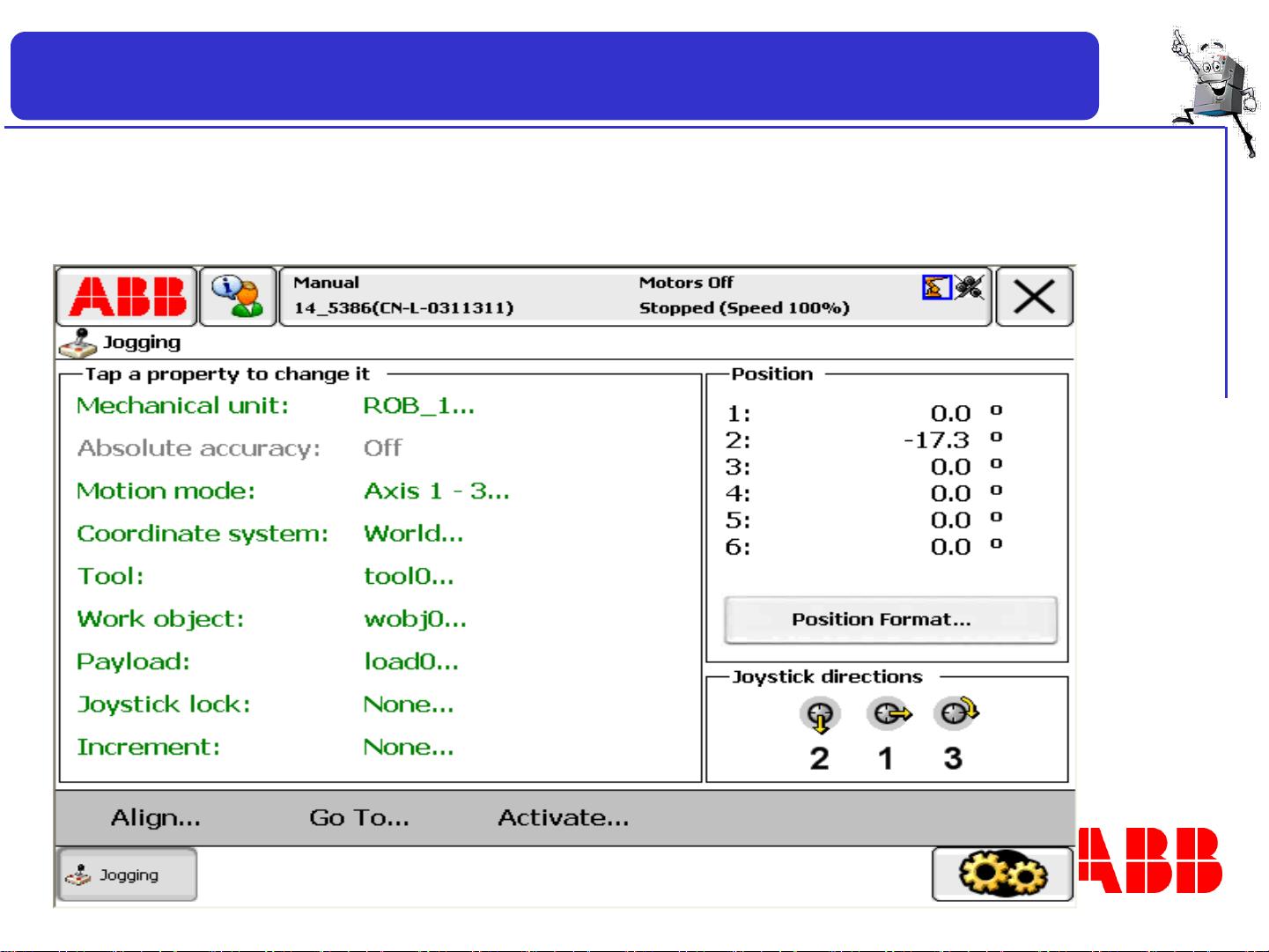
手 动 操 纵 机 器 人 操纵窗口 将机器人操作模式选择器置 于手动限速模式。 在ABB主菜单重,选择Jogging,进入操纵窗口。 操纵窗口 操纵窗口做相应选择 机械单元 在操作窗口点击Mechanical unit,选择机械 单元,然后点击 OK。 可以在多个Robot和外轴之间进行切换。 运动模式 在操作窗口点击Motion mode,选择不同的运 动模式,然后点击 OK。 运动模式 选择不同座标系,机器人移动方向将改变。 Linear 直线运动 机器人工具姿态不变,器人 TCP 沿座标轴 线性移动。 Reorient 姿态运动 机器人 TCP 位置不变,机器人工具沿座标 轴转动,变姿态。 运动模式-单轴运动 Axis 1-3 轴 1-3 机器人一、二、三每个转轴单独转动。 Axis 4-6 轴 4-6 机器人四、五、六每个转轴单独转动。 机器人外轴运动必须为单轴运动。 运动坐标系 在操作窗口中点击Coordinate system,然后点 击 OK ,TCP将在选定的坐标系中运动. 工具坐标系 在操作窗口中点击Tool, 在已定义好的TCP 列表中选择相应的工具TCP.然后点
在ABB机器人的操作中,手动操纵是一个至关重要的环节,它允许操作员对机器人进行精确的控制,以便于调试、设置工作路径或者进行简单的任务执行。本文将深入解析手动操纵的相关知识点,包括操作模式、机械单元选择、运动模式、运动坐标系、工具坐标系以及其它辅助功能。
操作模式的选择至关重要。将机器人操作模式选择器置于“手动限速模式”后,可以通过ABB主菜单中的“Jogging”选项进入操纵窗口。手动限速模式确保了在手动操作时机器人的运动速度被限制,增加了安全性。
在操纵窗口中,可以进行机械单元的选择。机械单元指的是机器人系统中的不同部分,包括主机器人和可能连接的外部轴。通过点击“Mechanical unit”,操作员可以选择要控制的特定单元,例如,可以在多个机器人或外轴之间切换,这在处理多关节系统时非常有用。
运动模式是控制机器人运动方式的关键设置。有多种运动模式可供选择,如“Linear”(直线运动)和“Reorient”(姿态运动)。在“Linear”模式下,机器人工具保持其姿态不变,仅TCP(工具中心点)沿坐标轴进行线性移动;而在“Reorient”模式下,TCP的位置保持不变,但工具会沿坐标轴转动,改变其姿态。此外,还可以通过“Axis 1-3”和“Axis 4-6”分别控制机器人的一到三个主轴以及四到六个轴的单独转动,这对于调整关节角度非常实用。需要注意的是,当涉及到机器人外轴时,它们必须执行单轴运动。
运动坐标系的选取决定了TCP在哪个坐标系统中运动。点击“Coordinate system”,操作员可以选择预定义的坐标系,这会影响机器人的运动方向。同时,工具坐标系(Tool)允许选择已定义好的TCP,使得不同工具或工具端点可以在同一坐标系下进行操作。在“Work object”选项中,可以设置工件坐标系,以适应不同工件的工作需求。负载(Payload)则用于选择机器人所承载的负载数据,确保机器人在负载下的正确运动。
辅助功能如“Joystick lock”允许锁定操作杆的某些方向,增强控制精度。“Increment”功能用于增量运动,也称为点动运动模式,适合进行精细定位。屏幕右下角的快捷键提供了一种快速选择机械单元、坐标系、运动模式和运行速度的方式,提高了操作效率。
使能器在手动模式下起到关键作用。在自动模式下,使能器无效,但在手动模式下,它有三个位置:起始位置“0”(电机不上电)、中间位置“1”(电机可上电)和最终位置“0”(电机不上电)。要重新启动电机,必须将使能器返回到起始状态。
总结来说,手动操纵ABB机器人涉及了多方面的设置和控制,包括操作模式、机械单元、运动模式、坐标系选择、负载管理以及各种辅助功能。理解并熟练掌握这些知识点,对于有效地操作和编程ABB机器人至关重要。