
1
页数
页数
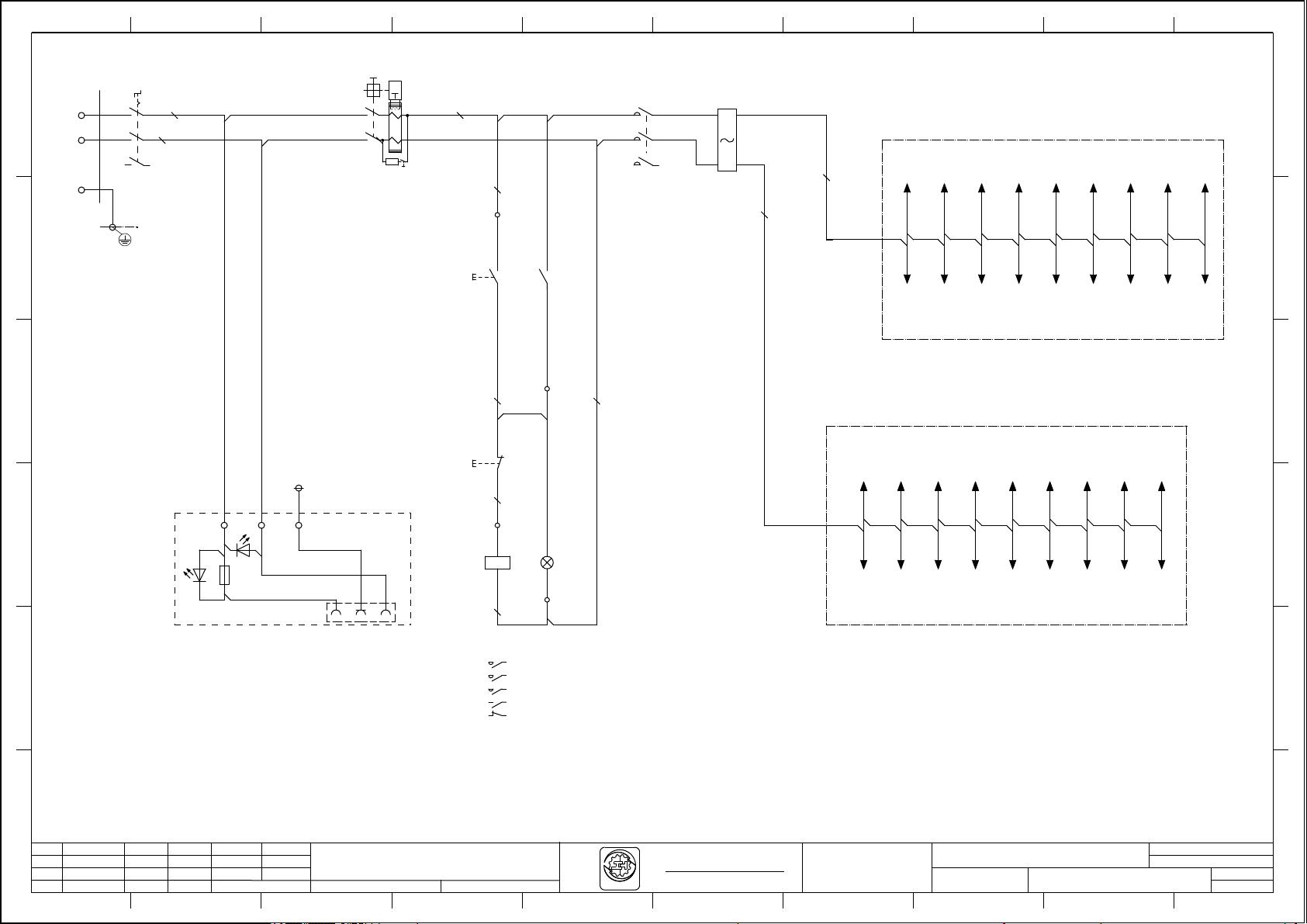
3TF接线件组装机
=CA1+EAB/1
初始
P024-004-T1-110418
+
日期
CHECKED
替代人
FB1
FTA
系统构成图
修改 替代人 56
2
1
=
姓名
Harmontronic
Harmontronic
瀚川机电
DRAWN APPROVED
A
B
C
D
E
F
A
B
C
D
E
F
WANGWEI
2011-10-25
2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 910
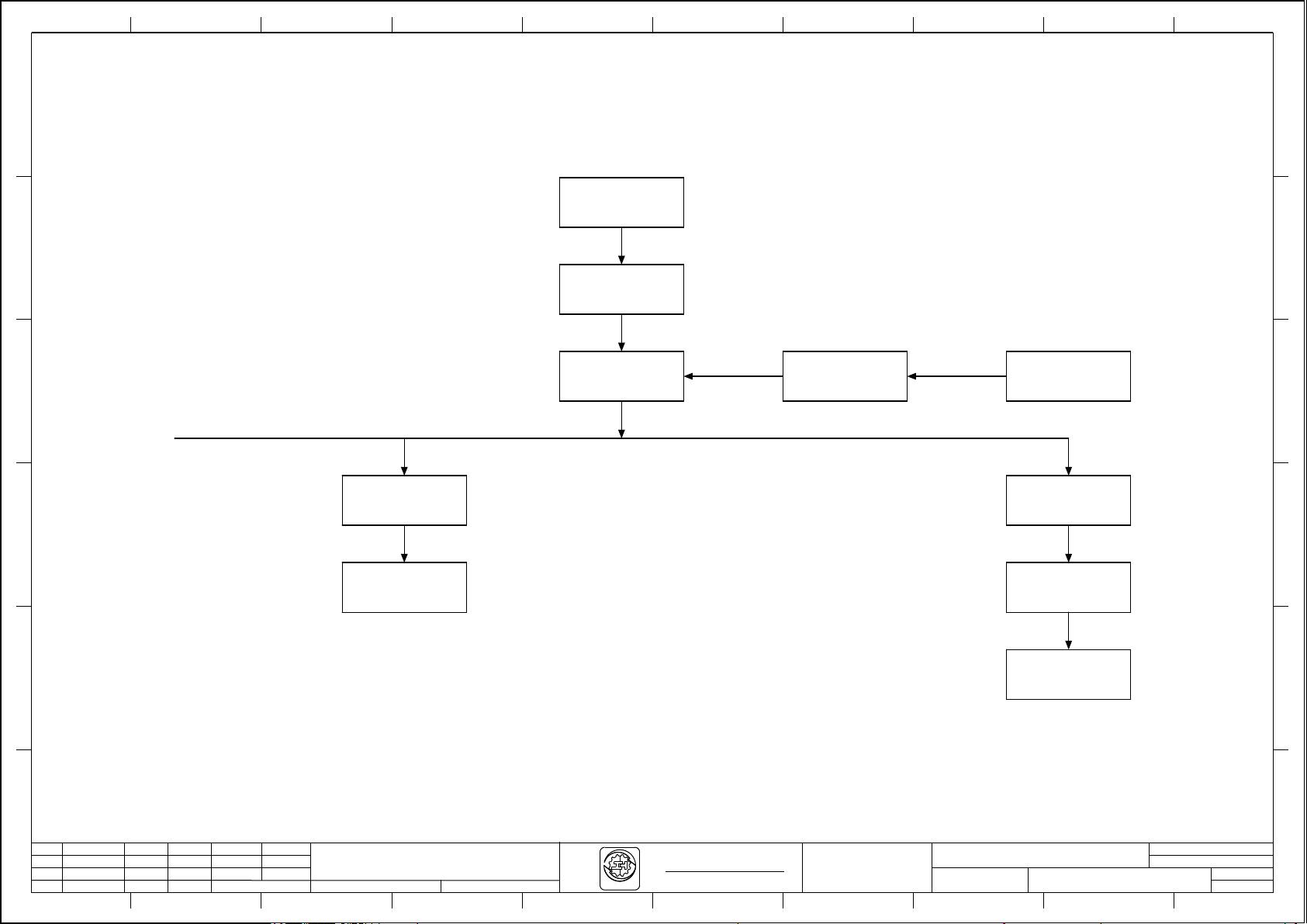
系统构成图
操作界面
(触摸屏)
I/O操作和
数据设置
PLC 输入I模块 外部输入信号
伺服驱动器
伺服马达
输出O模块
电磁阀
汽缸
剩余44页未读,继续阅读
资源评论

 weixin_411750442023-11-01资源很受用,资源主总结的很全面,内容与描述一致,解决了我当下的问题。
weixin_411750442023-11-01资源很受用,资源主总结的很全面,内容与描述一致,解决了我当下的问题。- kefuyucheng2024-05-05支持这个资源,内容详细,主要是能解决当下的问题,感谢大佬分享~

是空空呀
- 粉丝: 195
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于Java开发的日程管理FlexTime应用设计源码
- SM2258XT-BGA144-4BGA180-6L-R1019 三星KLUCG4J1CB B0B1颗粒开盘工具 , EC, 3A, 94, 43, A4, CA 七彩虹SL300这个固件有用
- GJB 5236-2004 军用软件质量度量
- 30天开发操作系统 第 8 天 - 鼠标控制与切换32模式
- spice vd interface接口
- 安装Git时遇到找不到`/dev/null`的问题
- 标量(scalar)、向量(vector)、矩阵(matrix)、数组(array)等概念的深入理解与运用
- 数值计算复习内容,涵盖多种方法,内容为gpt生成
- 标量(scalar)、向量(vector)、矩阵(matrix)、数组(array)等概念的深入理解与运用
- 网络综合项目实验12.19
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


