PID算法及MATLAB仿真.docx
需积分: 12 137 浏览量
2020-01-19
16:33:58
上传
评论
收藏 293KB DOCX 举报


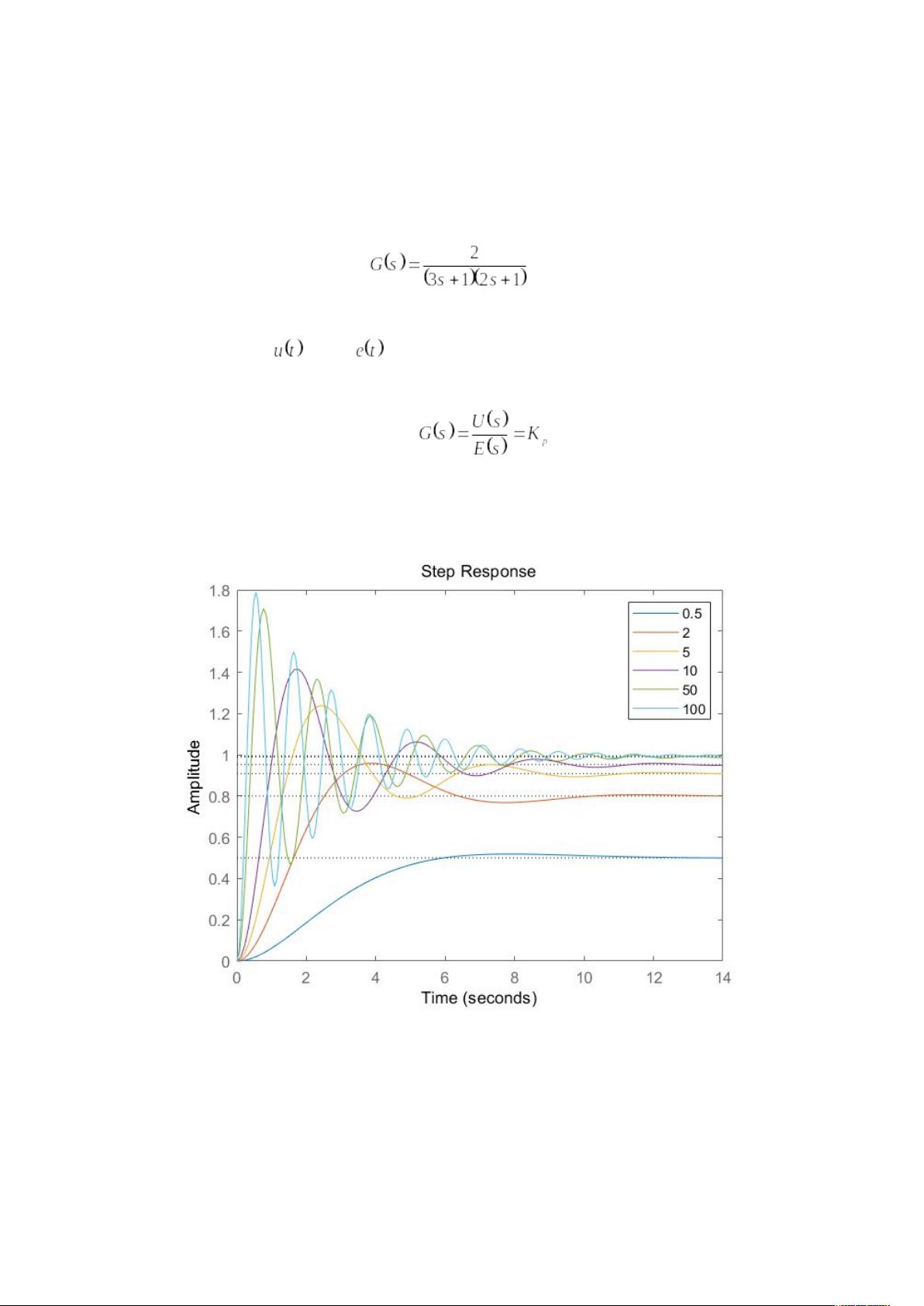
PID 算法及 MATLAB 仿真
一、实验目的
PID 是 Propertional(比例)、Integral(积分)、Dierential(微分)三者的缩写。
PID 调节是连续控制系统中技术最成熟、应用最广泛的调节方式。 PID 调节实质是根据输
入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出。PID
控制器参数的设置是否合适对其控制效果具有很大的影响。
二、实验原理
PID 控制是将误差信号 e(t)的比例(P)、积分(I)和微分(D)通过线性组合构成控制量进
行控制,其输出信号为:
(
1
)
将上式进行拉普拉斯变换后,整理得 PID 控制器的传递函数为:
(
2
)
其中 ——比例系数
——积分时间常数
——微分时间常数
——时间偏差
——控制量
PID 控制系统框图:
图 1.PID 控制系统结构框图

剩余10页未读,继续阅读
资源评论


GardeniaMinwentel
- 粉丝: 78
- 资源: 8











