IMU
上
⻋
前
检查
⽅
法
背
景
⽬
前
阶
段
,
HoloArk
上
⻋
之
前
需
要
对
IMU
的
合
格
性
进
⾏
判
断
,
避
免
上
⻋
之
后
imu
的
性
能
问
题
影
响
功
能
闭
环
。
这
⾥
列
举了⼀下
当
前
的
⼀些
评
估
想
法
,
作
为
初
步
⽅
案
供
评
审
。
评
估
内
容
⽬
前
,
为了
保
证
当
前
的
评
估
⽅
法
能
够
应
⽤
到
量
产
环
节
中
,
将
验
证
的
指
标
分
为
常
温
标
定
指
标
和
研
发
评
估
指
标
。
其
中
,
常
温
标
定
指
标
指
的
是
对
常
温
转
台
标
定
出
的
参
数
进
⾏
评
估
,
来
判
断
IMU
是
否
异
常
,
此
指
标
可
以作
为
量
产
流
程
中
的
⼀
部
分
。
研
发
评
估
指
标
是
在
研
发
阶
段
可
以
额
外
增
加
的
环
节
⽤
于
校
验
常
温
指
标
验
收
通过
的
IMU
指
标
是
否
正
常
。
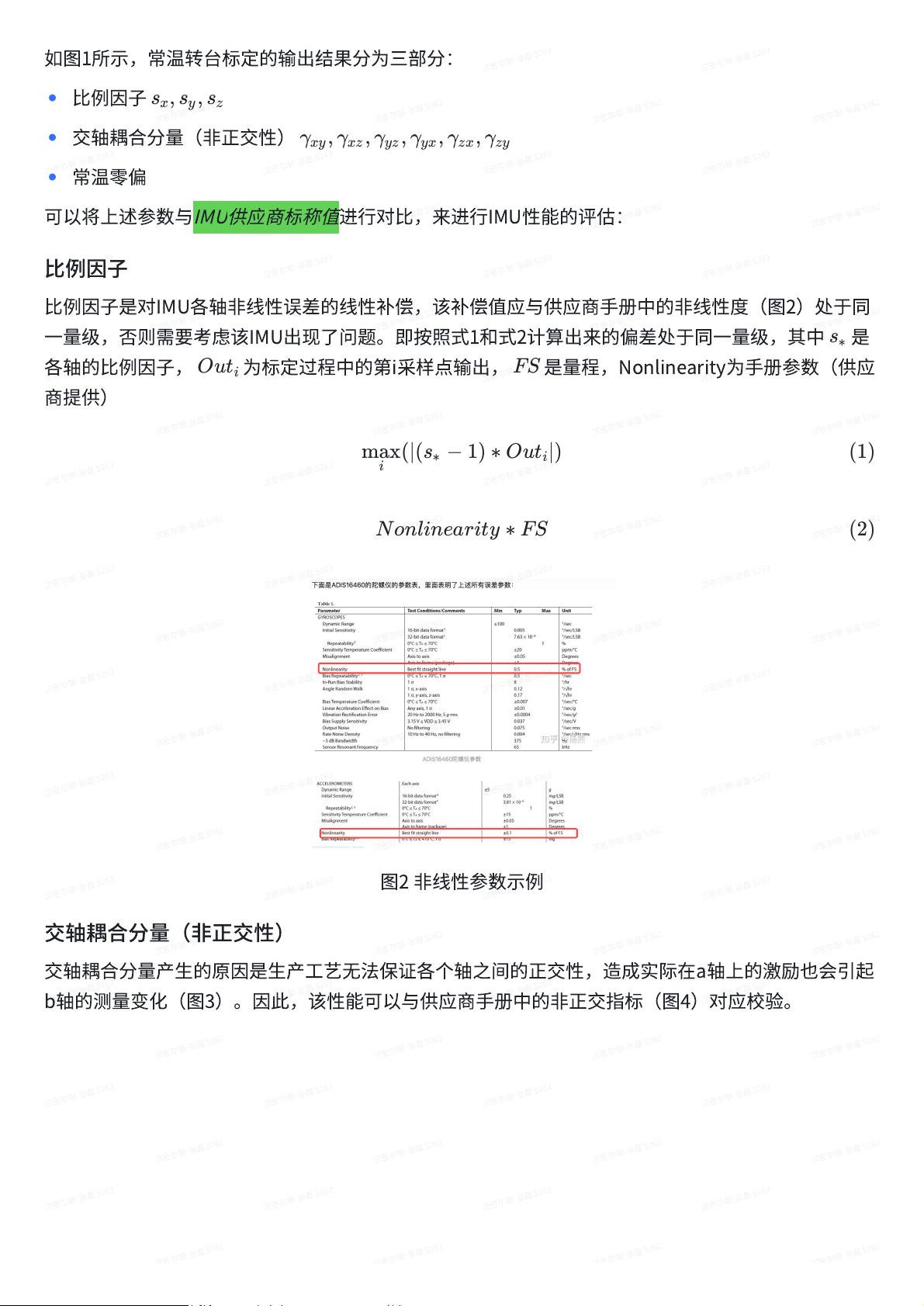
常
温
标
定
指
标
图
1
常
温
转
台
标
定
参
数
(
加
速
度
)