
环境部署
librealsense和realsense2_camera
装librealsense(ubuntu18.04和ubuntu20.04都可以用下面命令)
装realsense2_camera,ubuntu18.04上用下面命令
ubuntu20.04上用下面命令
kalibr docker
安装docker
(sudo apt-get update)
sudo apt-get install docker (Ubuntu上安装docker)
sudo apt install docker.io
首先拉取docker的时候应该是拉取的
里面填充进
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key
F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver
hkp://keyserver.ubuntu.com:80 --recv-key
F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo
$(lsb_release -cs) main" -u
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
sudo apt-get install ros-melodic-realsense2-camera
sudo apt-get install ros-noetic-realsense2-camera
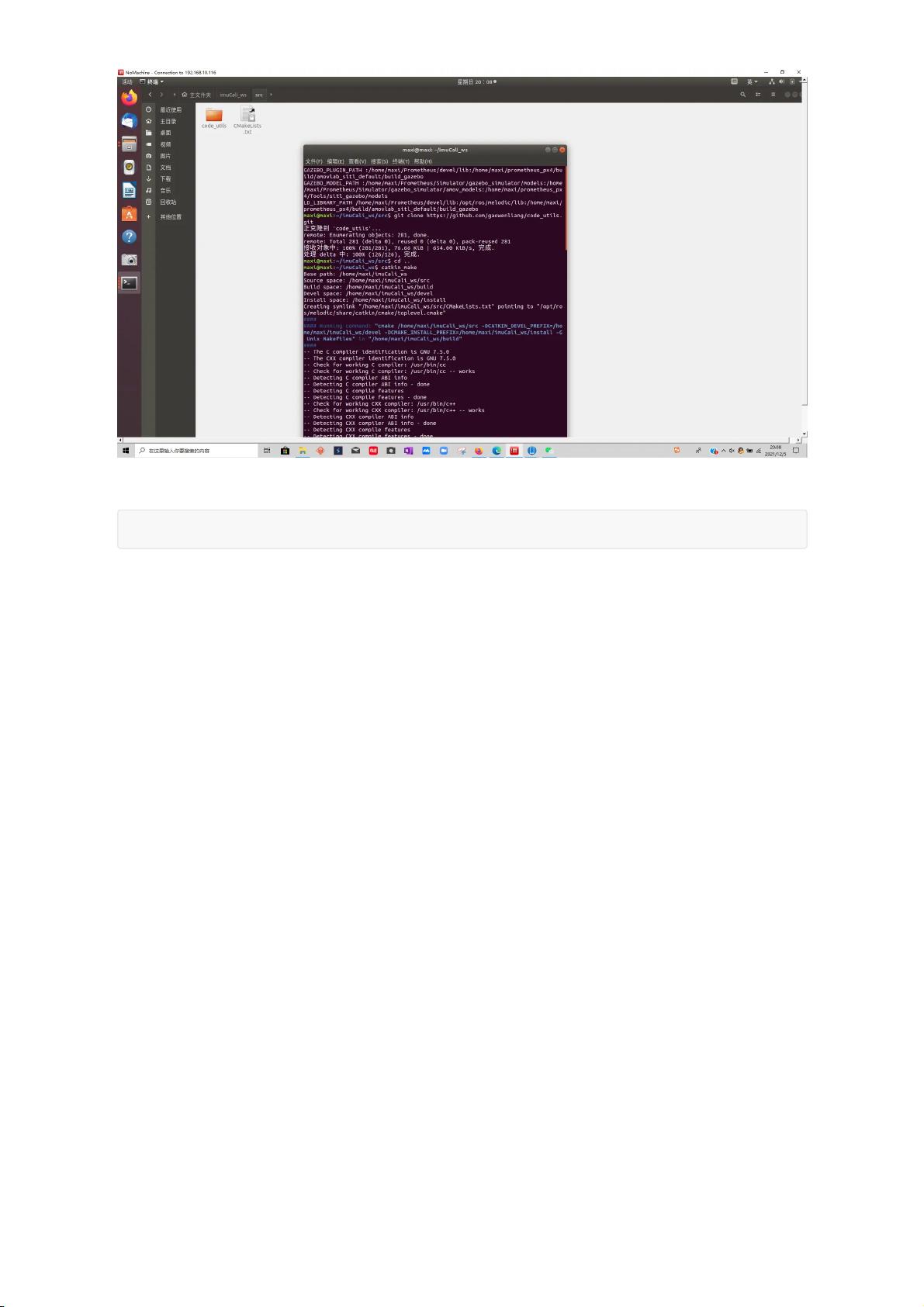
sudo docker pull stereolabs/kalibr:kinetic 注意是kinetic的,因为你运行的那个脚本就是启
动的这个,它发现没有就会给你重新pull,当然很快。
touch run_kalibr.sh 新建一个run_kalibr.sh


剩余31页未读,继续阅读
资源评论


诗筱涵
- 粉丝: 5722
- 资源: 10









最新资源
- 智慧交通分析-基于Spark的交通智能分析系统的设计与实现-最新开发(含全新源码+设计报告及资料).zip
- 智慧楼宇新项目-基于Linux平台和C#开发的智能楼宇安全监控报警系统-(全新源码+设计报告及资料).zip
- 2023物联网大赛华为赛道参赛项目-物体识别、多角度拍摄物体并进行三维建模(源码+全部资料).zip
- 机器学习基于恶意样本的图像化及对恶意代码检测系统-最新开发(含全新源码+设计报告及资料).zip
- 互联网创新创业大赛-喷灌机和植保无人机-实现移动端远程控制机器运行(含全部参赛源码及资料).zip
- 中国机器人大赛-暨Robocup机器人世界杯中国赛机器人先进视觉赛道3D识别赛项(含全部参赛资料).zip
- 期末大作业基于SpringBoot+Vue的员工的季度绩效考核系统-最新开发(含全新源码+设计报告及资料).zip
- 基于sparkMLlib的森林植被类型预测分类系统设计与实现-最新开发(含全新源码+设计报告及资料).zip
- 互耦水槽液位控制的PID整定方法比较学习资料(基于MATLAB、SIMULINK的控制系统数字仿真大作业).zip
- 恶意程序检测-基于python机器学习的恶意代码检测系统-最新开发(含全新源码+设计报告及资料).zip
- 课设新作品基于Vue+SpringBoot+MySQL的校园二手物品交易系统+课设报告(含商品档案与预约功能).zip
- python新开发基于bi-LSTM+CRF算法的中文医学知识图谱命名实体识别系统(源码+设计报告及资料).zip
- 毕业设计基于Matlab设计与实现的交通标志识别系统带GUI-近期开发(全新源码+设计报告及资料).zip
- 课程设计基于Matlab开发火灾(火焰+烟雾)检测系统-近期开发(全新源码+设计报告+完整资料).zip
- 课设基于BootStrap+Springboot的二手物品交易市场系统-最新开发(含全新源码+设计报告及资料).zip
- 法研杯机器阅读理解挑战赛解决方案-基于深度学习BERT的自然语言处理(完整源码+设计资料).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


