焊接机器人说明书.doc
版权申诉
198 浏览量
2023-07-12
21:50:43
上传
评论
收藏 490KB DOC 举报

绪论
1946 年第一台电子计算机的问世以后,使得机器人这个概念
有了从戏剧走向现实的可能,随着大批量生产以及恶劣条件对自
动化程度高的操作机械的迫切需求,1954 年,美国的戴沃尔最早
提出了工业机器人的概念,并申请了专利。该专利的要点是借助
伺服技术控制机器人的关节,利用人手对机器人进行动作示教,
机器人能实现动作的记录和再现。这就是所谓的示教再现机器人,
现有的机器人差不多都是采用的这种控制方式。
现今,工业机器人的概念是指由操作机(机械本体)、控制器、
伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、
可重复编程、能在三维空间完成各种作业的机电一体化生产设备。
按照机器人从低级到高级的发展程度,可以把机器人分成三
代。
第一代机器人,主要指只能以“示教—再现”方式工作的机
器人。这类机器人的本体是一直类似于人的上肢功能的机械手臂,
末端是手爪等操作机构。
第二代机器人,是指基于传感器来工作的机器人。它依靠简
单的感觉装置获取作业环境和对象的简单信息,通过对这些信息
的分析、处理,做出一定的判断,对动作进行反馈控制。
第三代机器人,既智能机器人,这是一类具有高度适应性的
有一定自主能力的机器人。
目前世界上 90%以上的工业机器人都属于第一代机器人。真
正具有只能的、理想的、完整的智能机器人目前还处在研究阶段。
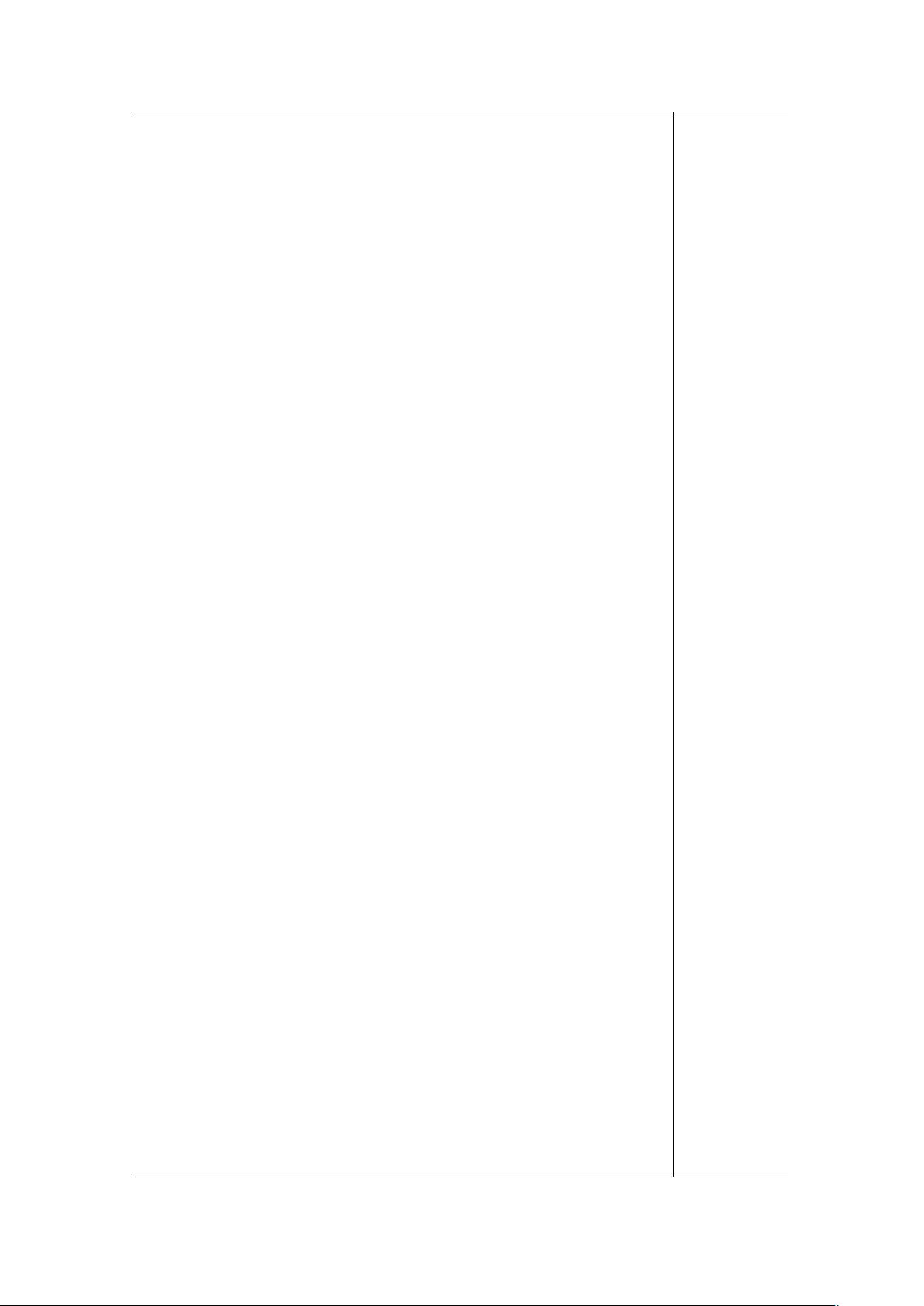
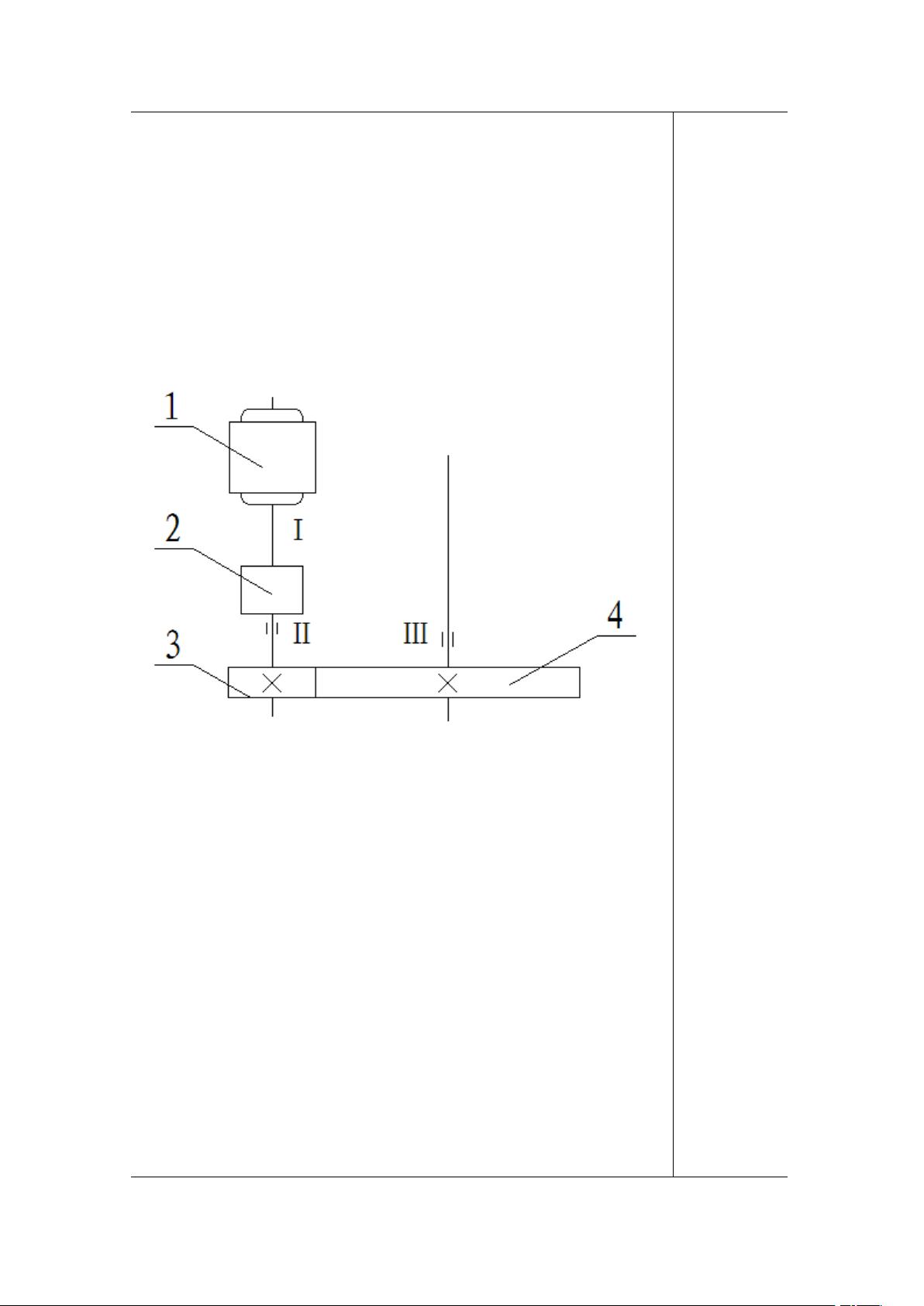
本次设计的焊接机器人也属于第一代机器人,设计其腰部的
回转台和内部系统。
剩余18页未读,继续阅读
资源评论


oligaga
- 粉丝: 52
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











