【老生谈算法】matlab实现基于遗传算法的LQR控制器优化设计.doc
版权申诉

基于遗传算法的 LQR 控制器优化设计
1、案例背景
LQR 控制在工程中得到了广泛的应用,对于 LQR 最优控制,其最优性完全取决于加权矩
阵的选择,然而该加权矩阵如何选择并没有解析方法,只能定性地去选择矩阵参数,所以这
样的“最优”控制事实上完全是认为的。如果选择不当,虽然可以求出最优解,但这样的“最
优解”没有任何意义。另一方面,加权矩阵的选择依赖于设计者的经验,需要设计者根据系
统输出逐步调整加权矩阵,直到获得满意的输出响应量为止,这样不仅费时,而且无法保证
获得最优的权重矩阵,因此获得的最优控制反馈系数不能保证使系统达到最优。遗传算法
(Genetic Algorithm,GA)是模仿自然界生物进化机制发展起来的全局搜索优化方法,它
在迭代过程中使用适者生存的原则,采用交叉、变异等操作使得种群朝着最优的方向进化,
最终获得最优解。鉴于 LQR 控制方法权重矩阵确定困难的问题,本案例以汽车主动悬架作
为被控对象,将遗传算法应用于 LQR 控制器的设计中,利用遗传算法的全局搜索能力,以
主动悬架的性能指标作为目标函数对加权矩阵进行优化设计,以提高 LQR 的设计效率和性
能。
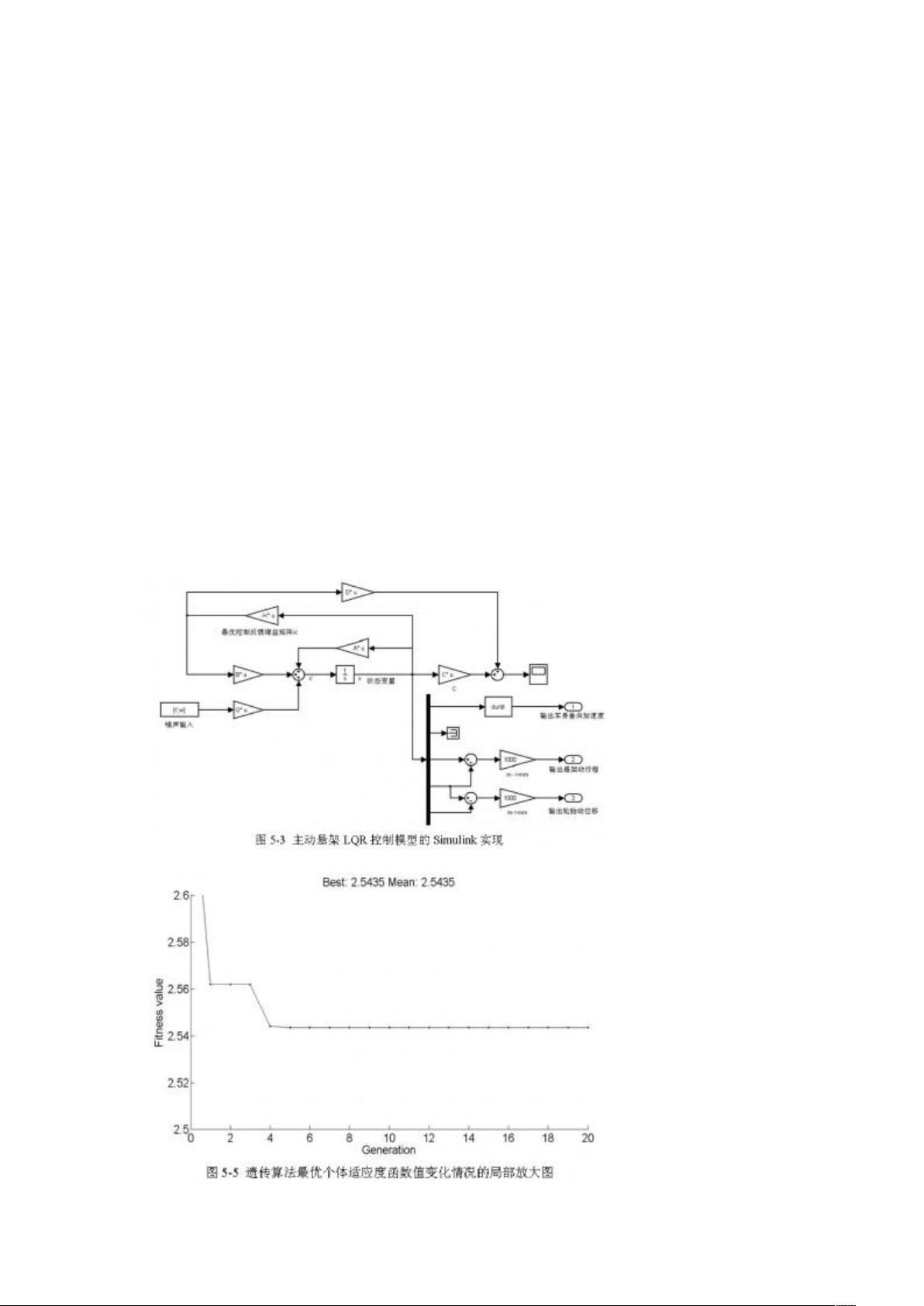
3、案例实例及结果:
资源评论

 qq_467063902023-11-14资源简直太好了,完美解决了当下遇到的难题,这样的资源很难不支持~
qq_467063902023-11-14资源简直太好了,完美解决了当下遇到的难题,这样的资源很难不支持~ 2301_774809962024-01-25总算找到了自己想要的资源,对自己的启发很大,感谢分享~
2301_774809962024-01-25总算找到了自己想要的资源,对自己的启发很大,感谢分享~












