【优化控制】基于遗传算法实现优化LQR控制器含Matlab
源码
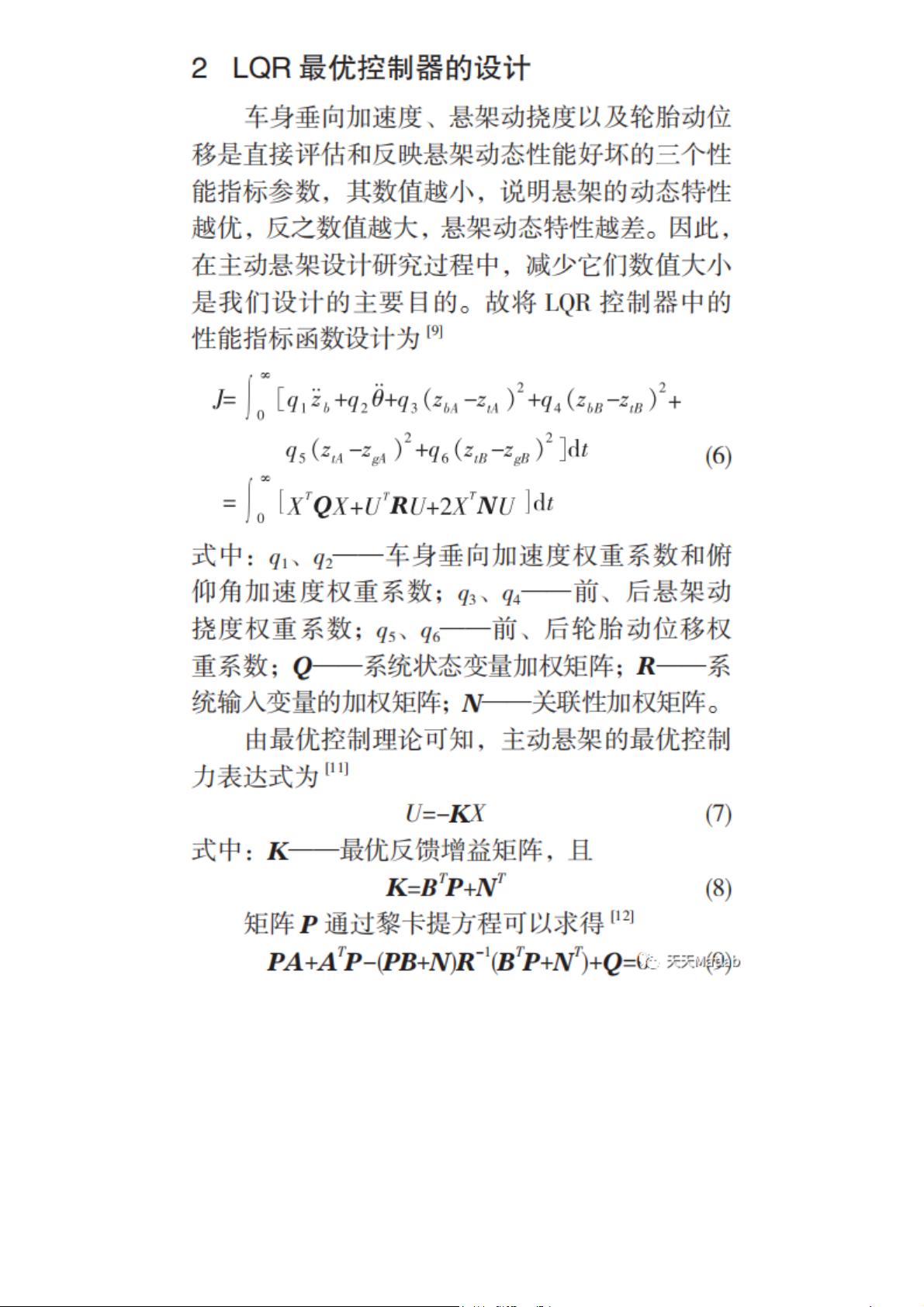
1 简介
车辆悬架系统是影响汽车行驶平顺性和乘坐舒适性的重要结构部件。传统的被动悬架由于其弹性元件刚
度和减震器阻尼是固定不变的,这导致其只能适应某一特定路面行驶,限制了适应多样性路况的需求以
及车辆性能的改善。随着高速公路的快速发展和车速的提高,传统的被动悬架已经难以满足人们的需
求,主动悬架由于自身拥有控制能源,能够根据不同的行驶路况和汽车的行驶状态产生相应的控制力来
抵抗和平衡路面冲击,从而提高汽车的行驶平顺性和乘坐舒适性。因此,主动悬架的设计研究已经成为
未来悬架的发展趋势。控制策略的设计是主动悬架设计研究的关键。目前国内外许多学者提出了许多控
制方法,如 PID 控制、模糊控制、神经网络控制、最优控制等,但目前应用比较广泛的是线性二次最优
控制(简称 LQR 控制)。由于 LQR 控制器的设计易受人为主观因素影响以及控制方法易受干扰产生振
荡和误操作,导致无法保证获取最佳控制效果。因此,本文提出了一种基于遗传算法的 LQR 最优控制方
法(简称 GA+LQR 控制),其中,LQR 算法主要用于对悬架进行主动控制,遗传算法主要用于对控制器
中权重系数进行全局搜索优化,通过 MATLAB/Simulink 建立 4自由度非线性悬架系统动力学模型并进行
仿真分析,验证了该方法的可靠性与有效性。