基于MPU6050的INS惯性导航和实时姿态检测系统.doc
版权申诉
115 浏览量
2022-06-03
23:33:15
上传
评论
收藏 3.18MB DOC 举报


基于 MPU6050 的 INS 惯性导航和实时姿态检测系统
1. 项目目标及功能说明
1.1 项目目标
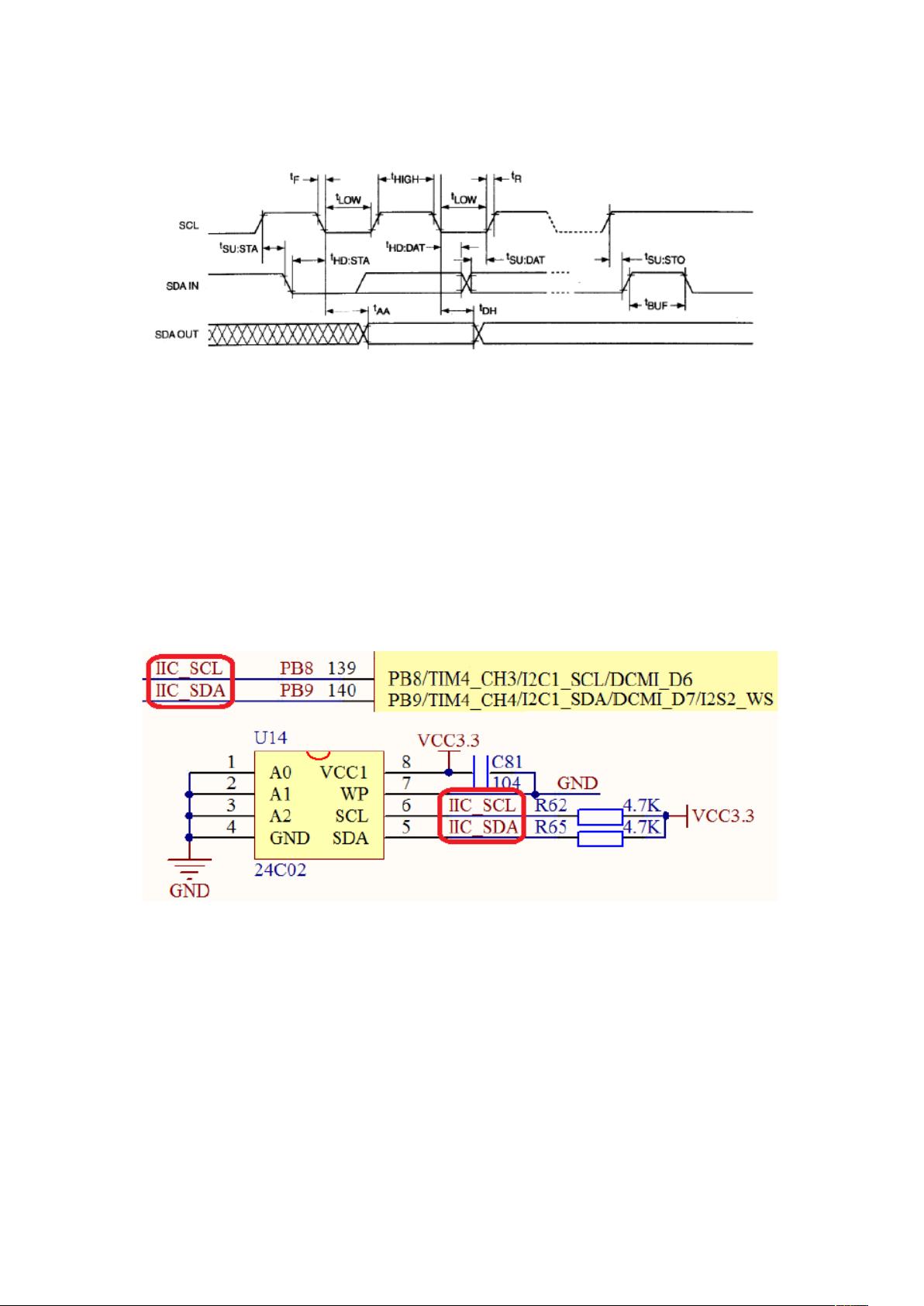
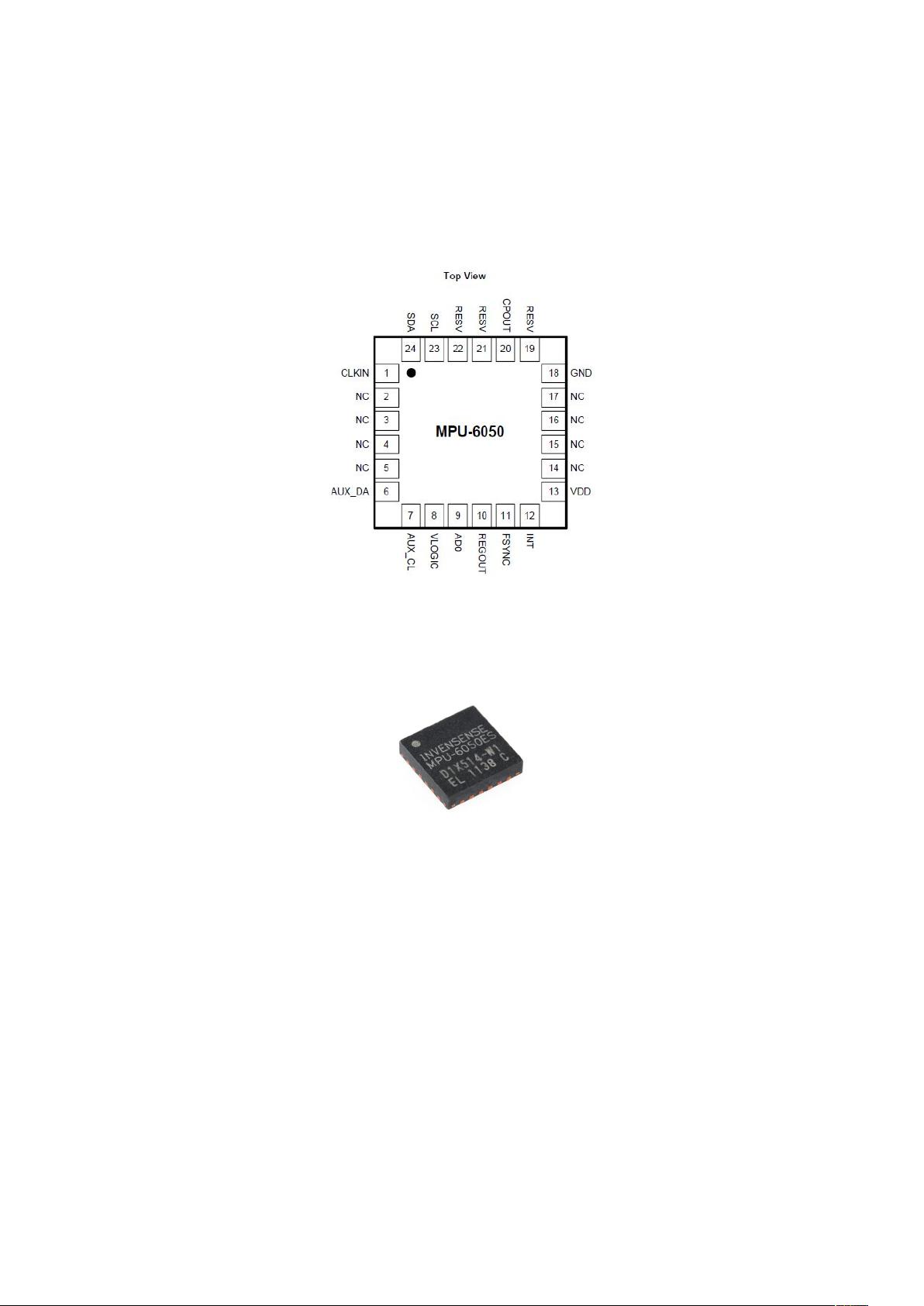
学习使用正点原子探索者开发板,并熟悉开发板上的 六轴传感器
的工作原理和各函数的调用过程。同时学习开发板的扩展接口,尝试在开发板
上扩展蓝牙模块,并实现开发板与手机等含有蓝牙模块的电子设备通过蓝牙连
接并进行数据的传输。在完成上述内容的基础上,实现将 六轴传感器
的加速度计和陀螺仪的数据传送到手机上,在手机上实现陀螺仪的变化效果展
示。同时通过串口将 数据传送到电脑上通过 编程处理数据实
现惯性导航的简单展示
1.2 系统功能说明
系统最主要的功能有两个一个是在手机端能够展示开发板上 陀
螺仪的姿态变化通过一个立方体的转动来表示陀螺仪的转动;另一个是在电脑
端 能 够 读 取 的 数 据 , 并 通 过 对 数 据 的 处 理 还 原 数 据 中 存 储 的
的姿态变化简单展现出惯性导航的效果。
在实现系统最主要的两个功能过程中还需要实现一些基础功能。开发板能
够通过蓝牙与手机连接并传输数据;开发板能够通过串口将数据发送出去在电
脑端能够读取开发板上串口输出的数据等。
2. 需求分析
惯性导航系统用于各种运动机具中包括飞机、潜艇、航天飞机等运输工具
及导弹,然而成本及复杂性限制了其可以应用的场合。但是,存在一种情形:
卫星一旦突然因故障、敌方打击或干扰(如太阳风暴)等原因无法提供服
务 , 这 对 依 赖 、 北 斗 等 卫 星 导 航 系 统 作 为 唯 一
(、、)信息来源的系统来说可能是致命的灾难
作为目前为止卫星导航系统最好的备援——惯性导航系统(,将于届


剩余44页未读,继续阅读
资源评论


智慧安全方案
- 粉丝: 3605
- 资源: 59万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











