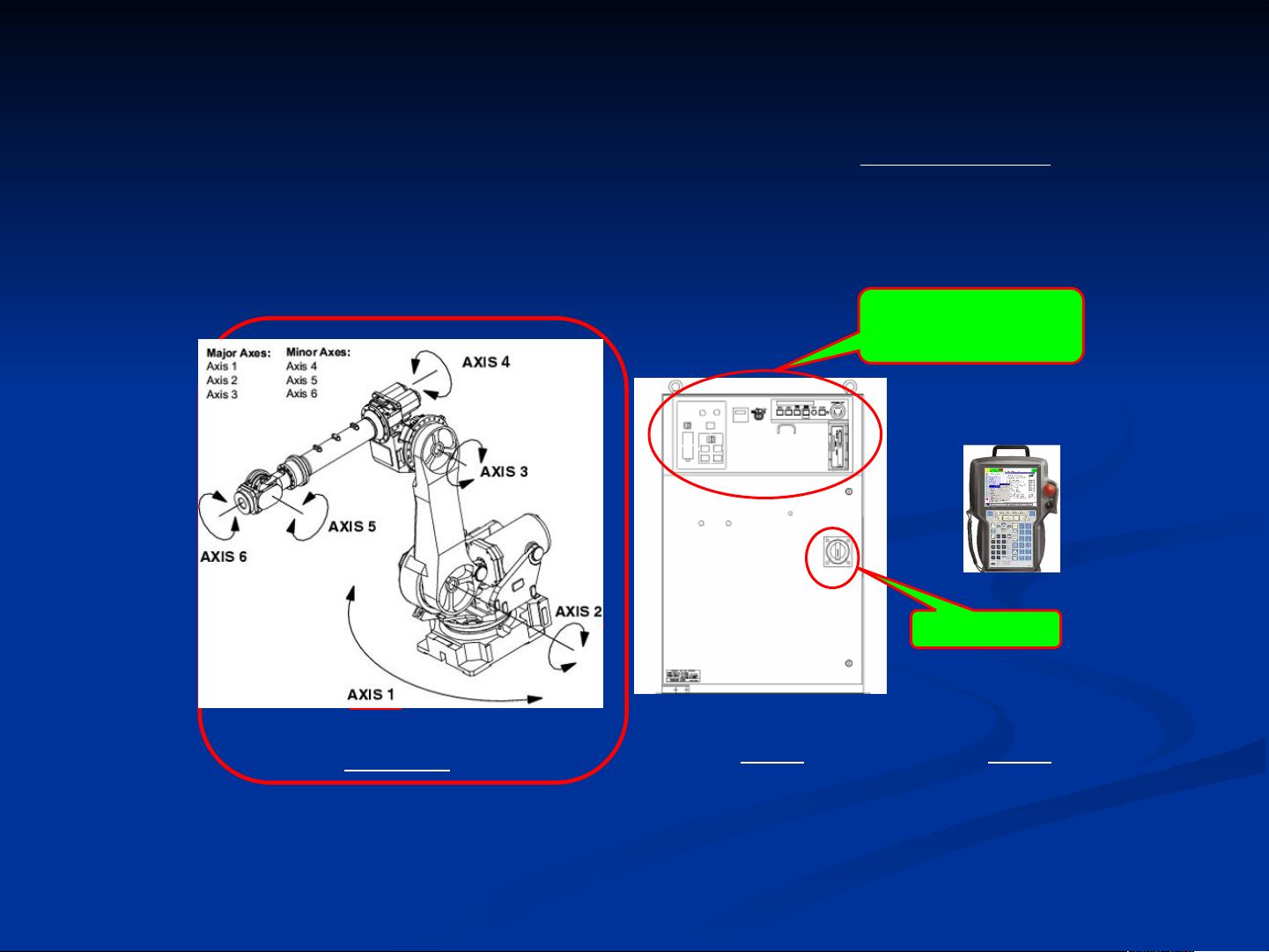
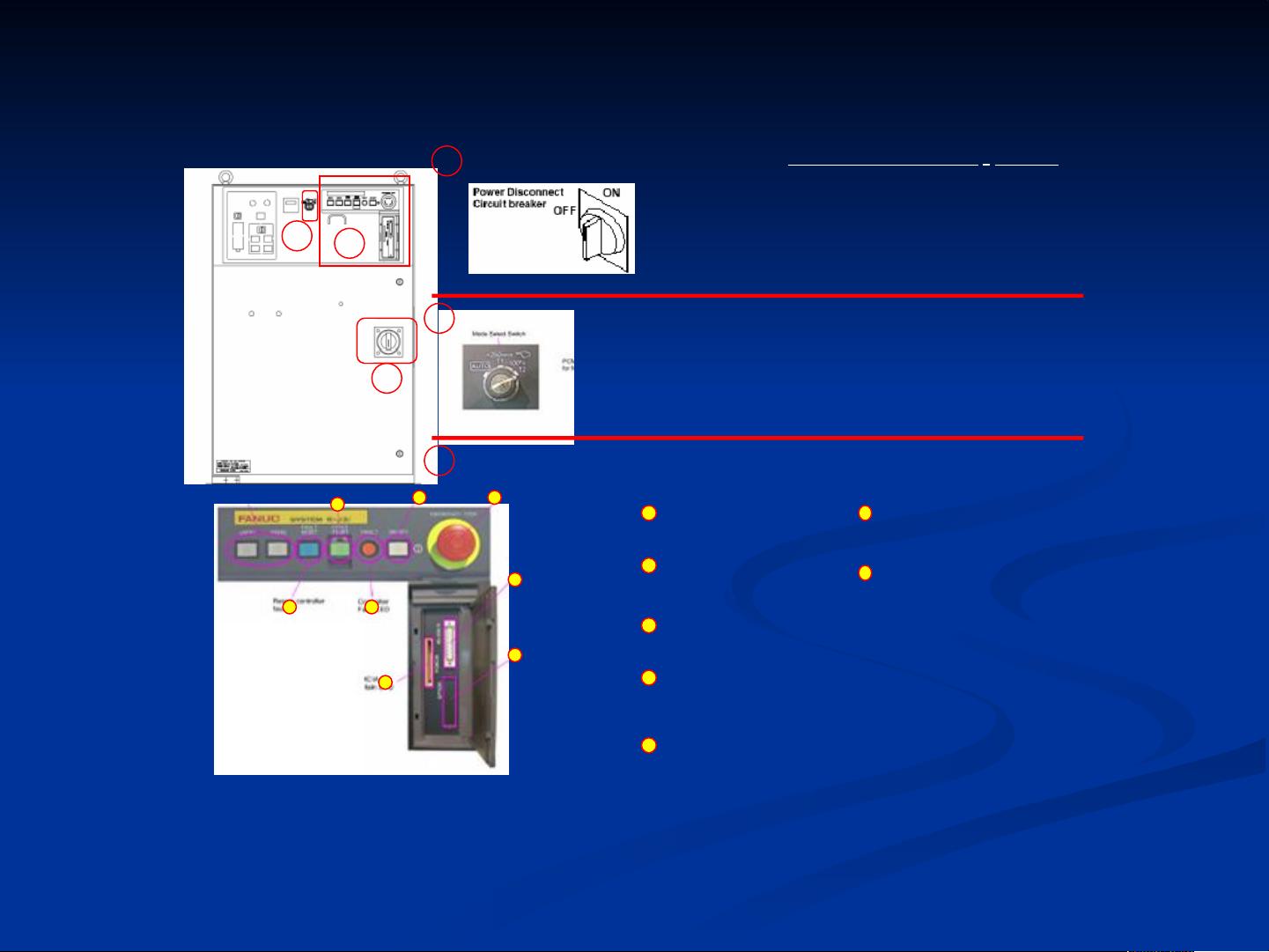
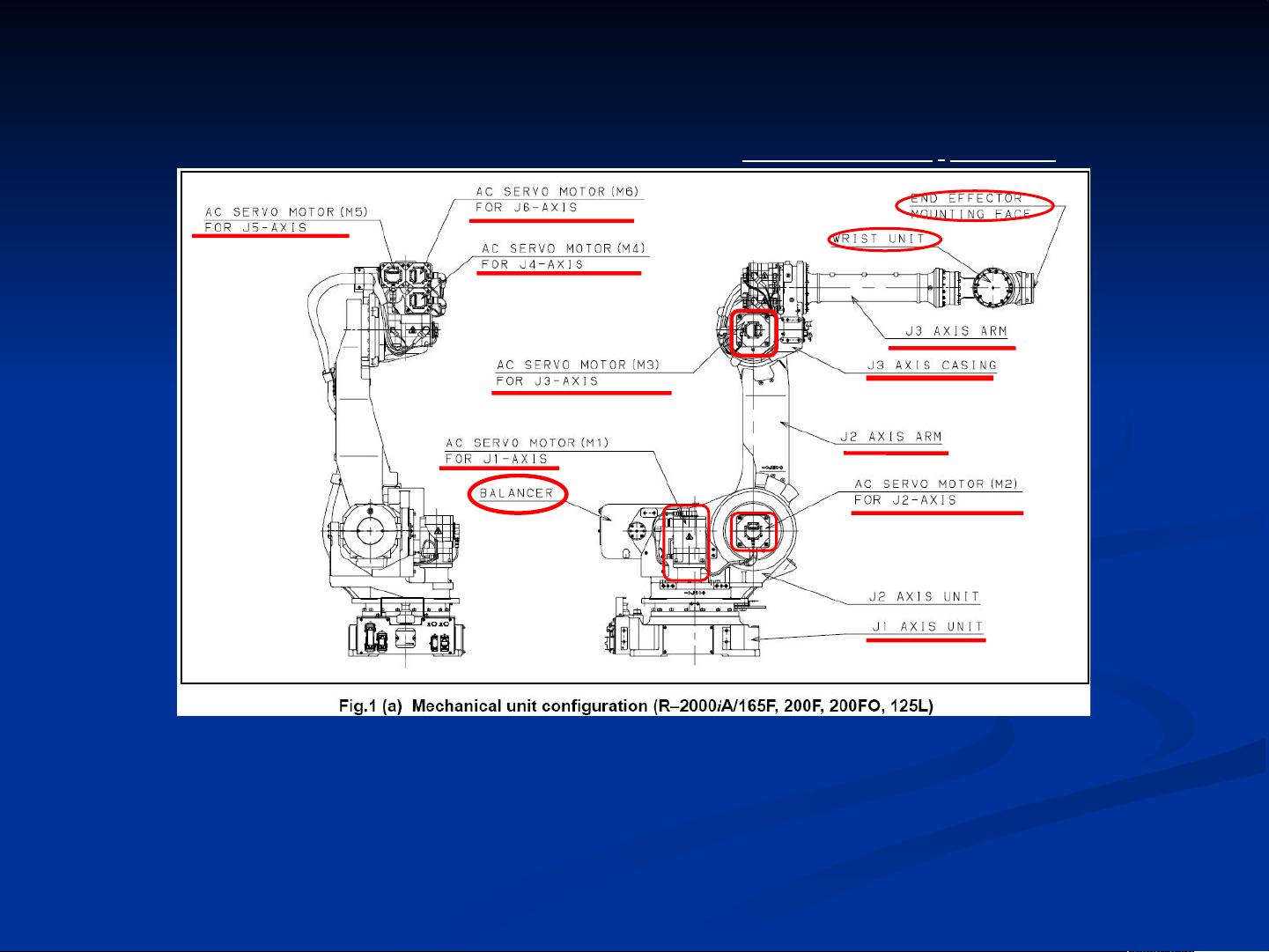
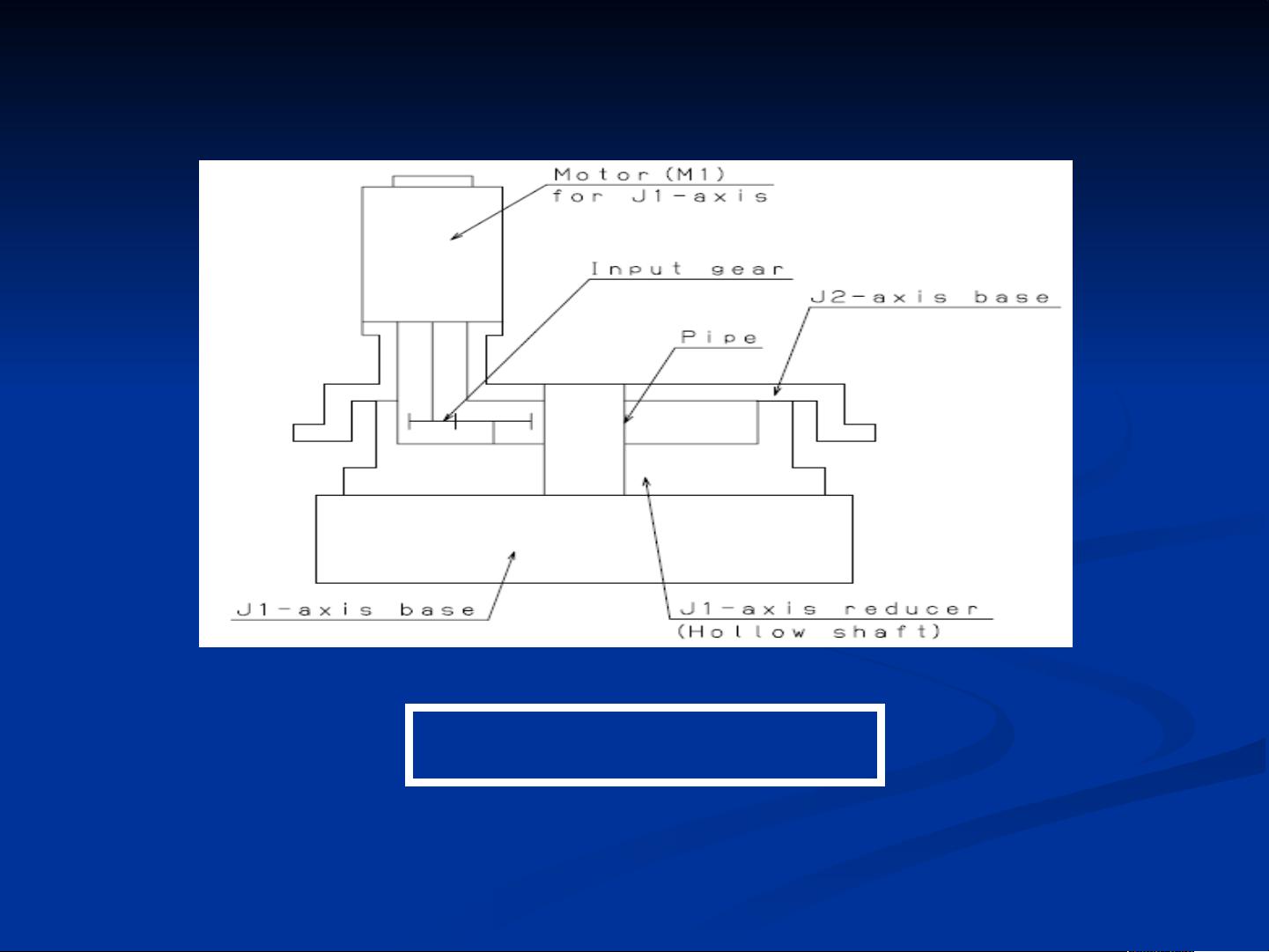
《FANUC机器人硬件介绍》 FANUC是一家全球知名的自动化设备制造商,其产品线中的工业机器人被广泛应用在各种制造业和物流行业中。本教程主要针对FANUC机器人的硬件构成进行详细解读,帮助用户理解其工作原理和操作方法。 FANUC机器人的本体是由伺服电机驱动的机械机构,通常包括4轴或6轴结构。4轴机器人常见于物流行业的码跺任务,而6轴机器人则能实现更复杂的运动路径。特殊应用场合可能会添加额外的关节或轨道以扩展其工作范围。 机器人本体主要包括以下几个核心部分: 1. **伺服电机** - 提供精确的动力和位置控制。 2. **减速机** - 增加扭矩并减缓转速,以适应重载和高精度的需求。 3. **编码器** - 监测关节的位置和速度,实现闭环控制。 4. **抱闸机构** - 在断电或紧急情况下确保机器人安全停止。 此外,机器人还包括了控制器和示教器: 1. **控制器** - 是机器人的大脑,处理来自示教器的指令,控制伺服电机的动作,以及与其他设备的通信。 2. **示教器**(Teach Pendant)- 用于编程、试运行和监控机器人状态,包括点动操作、程序编写、I/O设置查看等。 控制器内部结构包括: - **电源单元** - 提供电源。 - **主板单元** - 处理核心计算任务。 - **伺服放大单元** - 放大和调节伺服电机所需的电流。 - **控制面板** - 包含急停按钮、操作指示灯和模式选择开关等。 - **再生电阻** - 用于处理伺服电机在制动过程中的能量释放。 - **IO单元** - 接收和发送输入输出信号,连接外部设备。 机器人本体与外界的接口也是重要的组成部分,如: - **EE接口** - 用于连接末端执行器。 - **USER接口** - 用户自定义的输入输出接口。 - **AIR接口** - 连接气动系统。 - **DP2, DS2接口** - 数据通信接口。 - **RDI/RDO接口** - 提供8点输入和8点输出,支持24V直流电源。 维护和安全方面,机器人手册提供了详细的机械电气维护指南,包括如何正确运输机器人,以及紧急情况下的处理步骤。同时,急停单元和使能开关确保了操作安全。 总结来说,FANUC机器人的硬件结构复杂且精密,包括了伺服驱动的关节、智能控制器和直观的操作界面。理解和掌握这些硬件知识对于有效地使用和维护FANUC机器人至关重要。
剩余36页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~