Fanuc机器人控制器及编程PPT学习教案
该PPT学习教案主要介绍了Fanuc机器人控制器的编程和操作方法,涵盖了机器人控制器的基本操作、坐标系、速度调整、程序编辑、功能键、光标键、数字键、确认键、STEP键、FWD键、BWD键、WELD ENBL键、焊丝运动键、ITEM键、BACK SPACE键等方面的知识点。
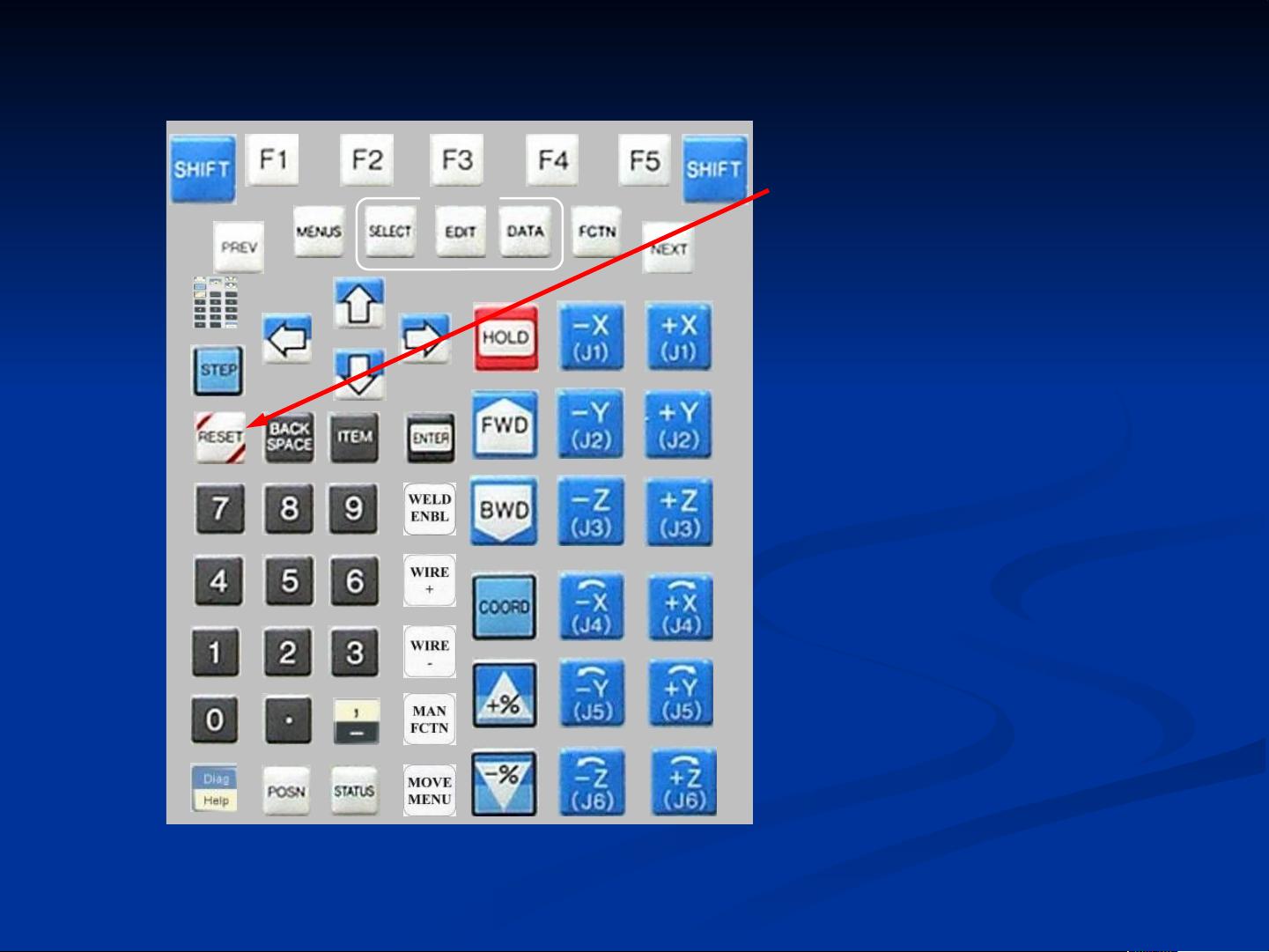
机器人控制器基本操作
* RESET键:用于清除报警信息
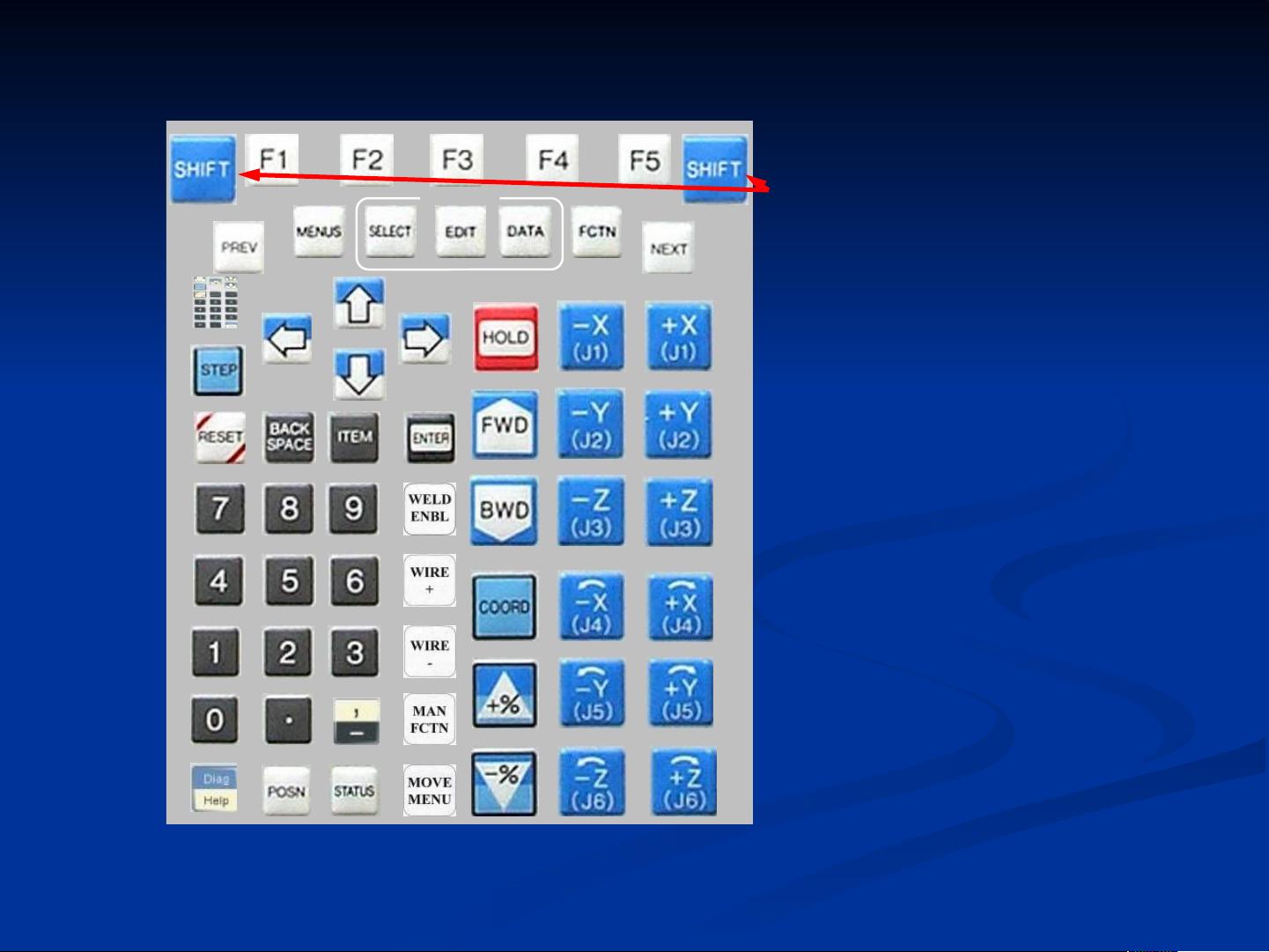
* SHIFT键:与其他键配合使用执行特定功能
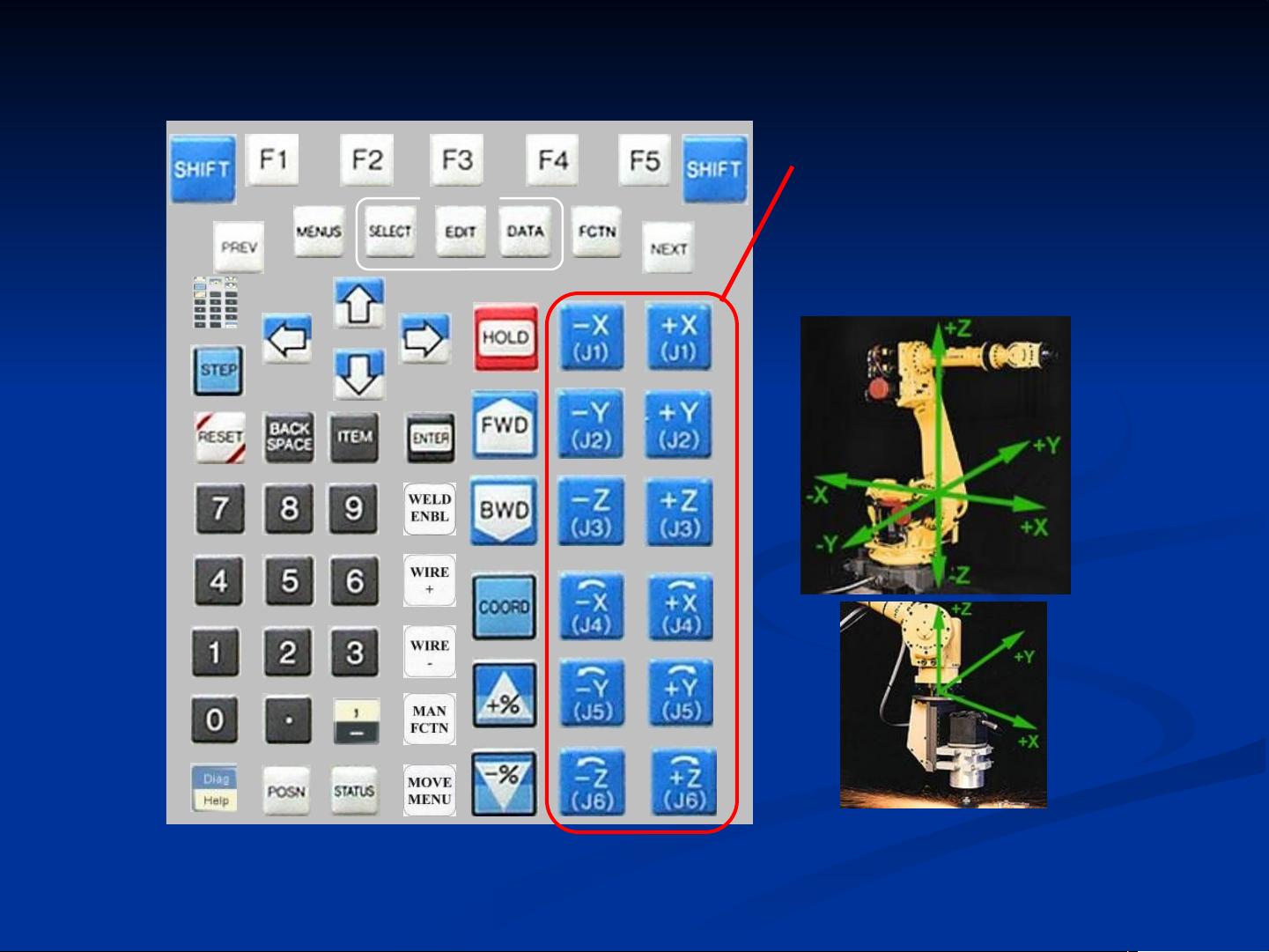
* Jog键:使用这些键来点动机器人
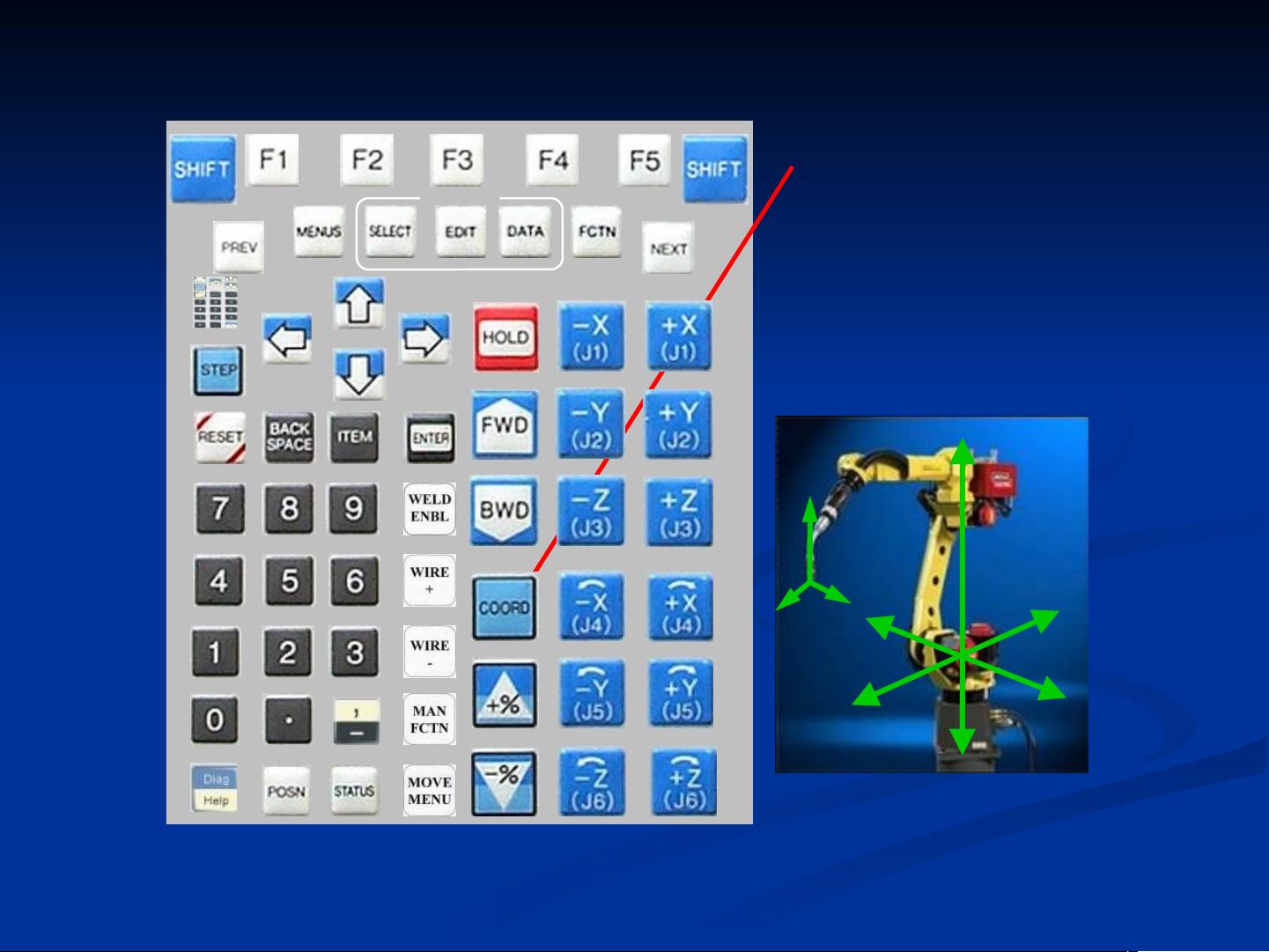
* COORD键:用于切换机器人运动的坐标系(World, Tool, Joint)
坐标系
* 机器人坐标系:包括关节坐标系(Joint)、直角坐标系(World)、工具坐标系(Tool)等
速度调整
* 速度键:用于调整机器人的运动速度
程序编辑
* 程序键:用于选择编程时的菜单选项
* SELECT键:显示程序清单
* EDIT键:显示当前使用或编写的程序
* DATA键:显示weld schedules, weld processes, weave schedules, TorchMate data等
功能键
* F1-F5键:执行指定的功能和操作
* NEXT键:显示更多的对应于F1-F5键的功能键
光标键
* 光标键:用于在屏幕上按一定的方向移动光标
数字键
* 数字键:用于输入数值、减号、小数点、逗号等
确认键
* 确认键:用于确认一个数值的输入,或者从一个菜单中确认选择一个项目
STEP键
* STEP键:在T1或T2模式中,使用该键在单步模式和连续模式间切换
FWD键和BWD键
* FWD键:在STEP开启时使用该键来执行下一个程序语句
* BWD键:用于执行排在光标前面的程序语句
WELD ENBL键
* WELD ENBL键:用于控制是否开启焊接过程
焊丝运动键
* 焊丝运动键:Wire “+” 使焊丝经由焊枪送出,Wire “–” 使焊丝经由焊枪回抽
ITEM键
* ITEM键:用于在一个列表中选择一个项目
BACK SPACE键
* BACK SPACE键:用于删除光标前的字母和数字



 2301_806515182023-11-03这个资源对我启发很大,受益匪浅,学到了很多,谢谢分享~
2301_806515182023-11-03这个资源对我启发很大,受益匪浅,学到了很多,谢谢分享~














