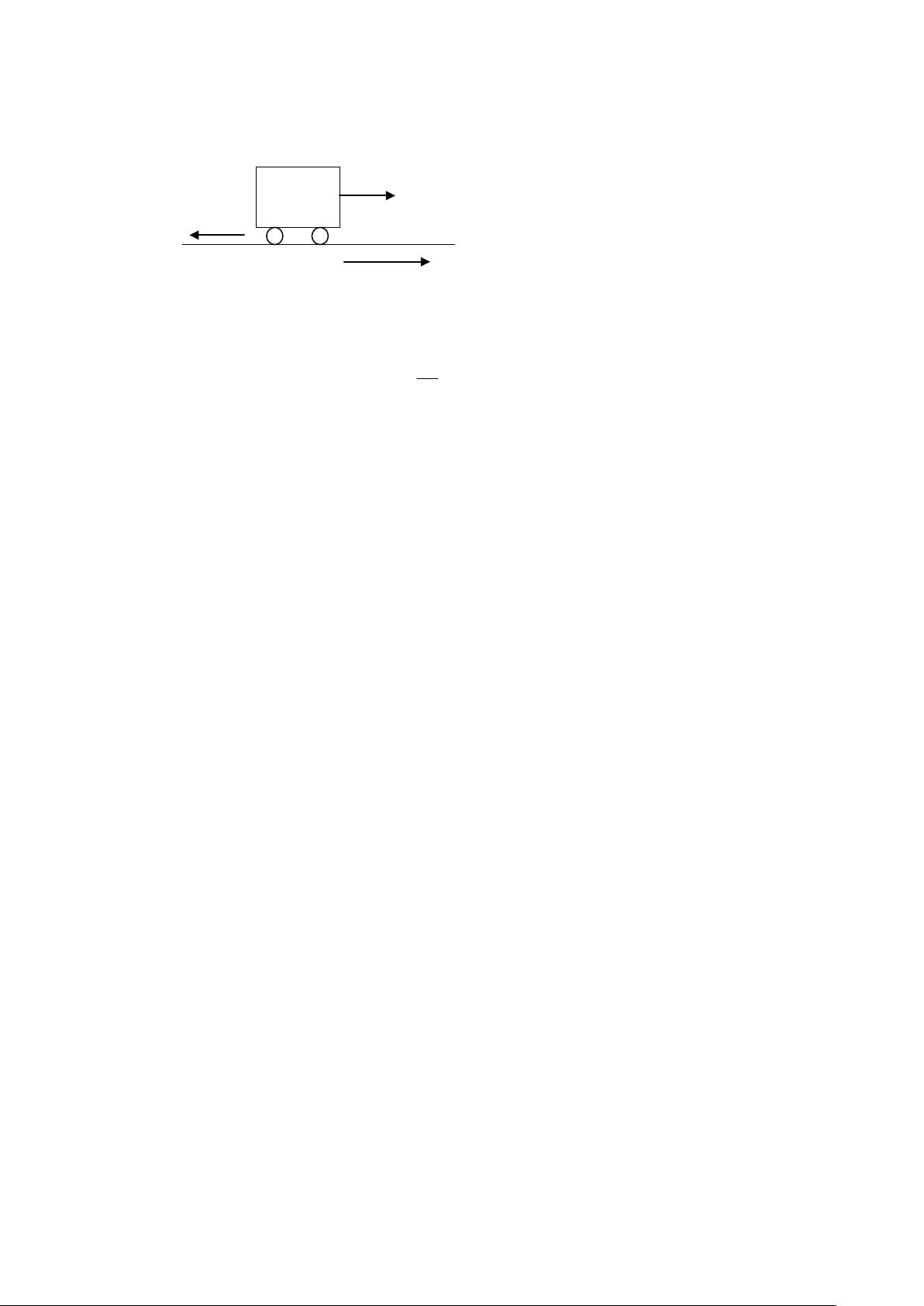
一 .问题描述
运动学方程: am=F-f f=b*v;
其中:F=500 N; b=50 Nsec/m; m=1000kg; 期望稳定速度:v=10 m/s
PID 控制器传递函数:
二 . 基本要求
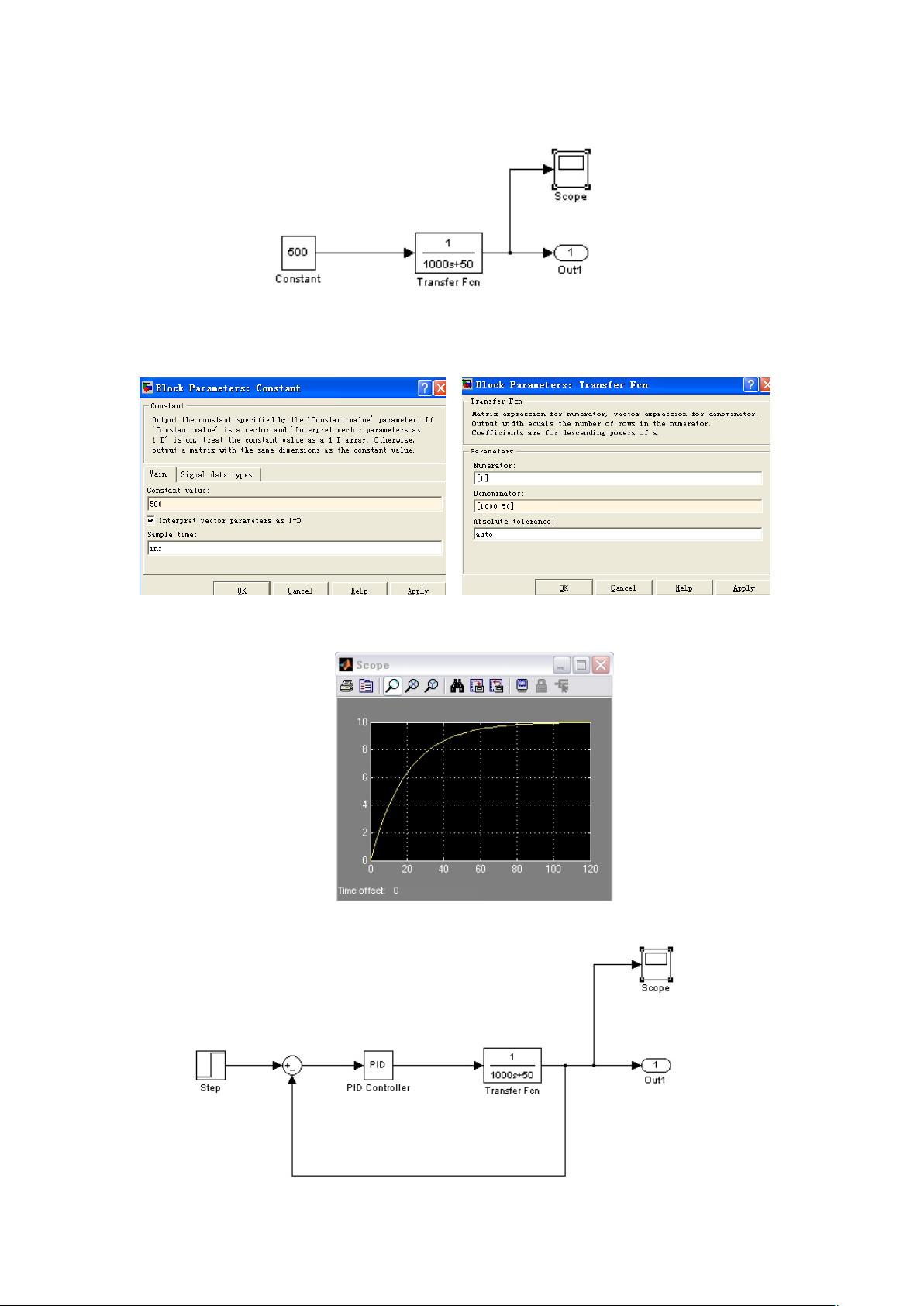
1. 未添加 PID 控制器的小车速度仿真模型, 仿真该小车在 500 N 的力的作用下
的速度变化曲线,仿真时间 120 s。
2. 添加了 PID 控制器的小车速度模型,可以通过双击 PID 控制器设置 PIDKp、
Ki、Kd 三个参数,并达到规定的速度曲线的指标。 以期望的稳定速度 v=10m/s
和当前速度 v(t) 之间的误差信号经过 PID 控制器后的信号作为小车的实际驱动
力,对小车速度曲线进行控制。达到下列指标:(仿真时间 25s)
上升时间:<5 Sec 超调量:<10% 稳态误差:<2%
3. 小车速度仿真曲线之间的切换通过友好的菜单界面来实现,网格线开关,指
标的显示(上升时间, 超调量, 稳态误差)等。
三 . 运行环境
本模型使用 matlab 6.5 进行编程及仿真。其中用到两个模型文件和一个
figer 文件。使用 simulink 与编程相结合的方式。
四 .功能简介
1. 未添加 PID 控制器的小车速度仿真模型
sKd
s
Ki
KpsG *)( ���
F
m
f
v