


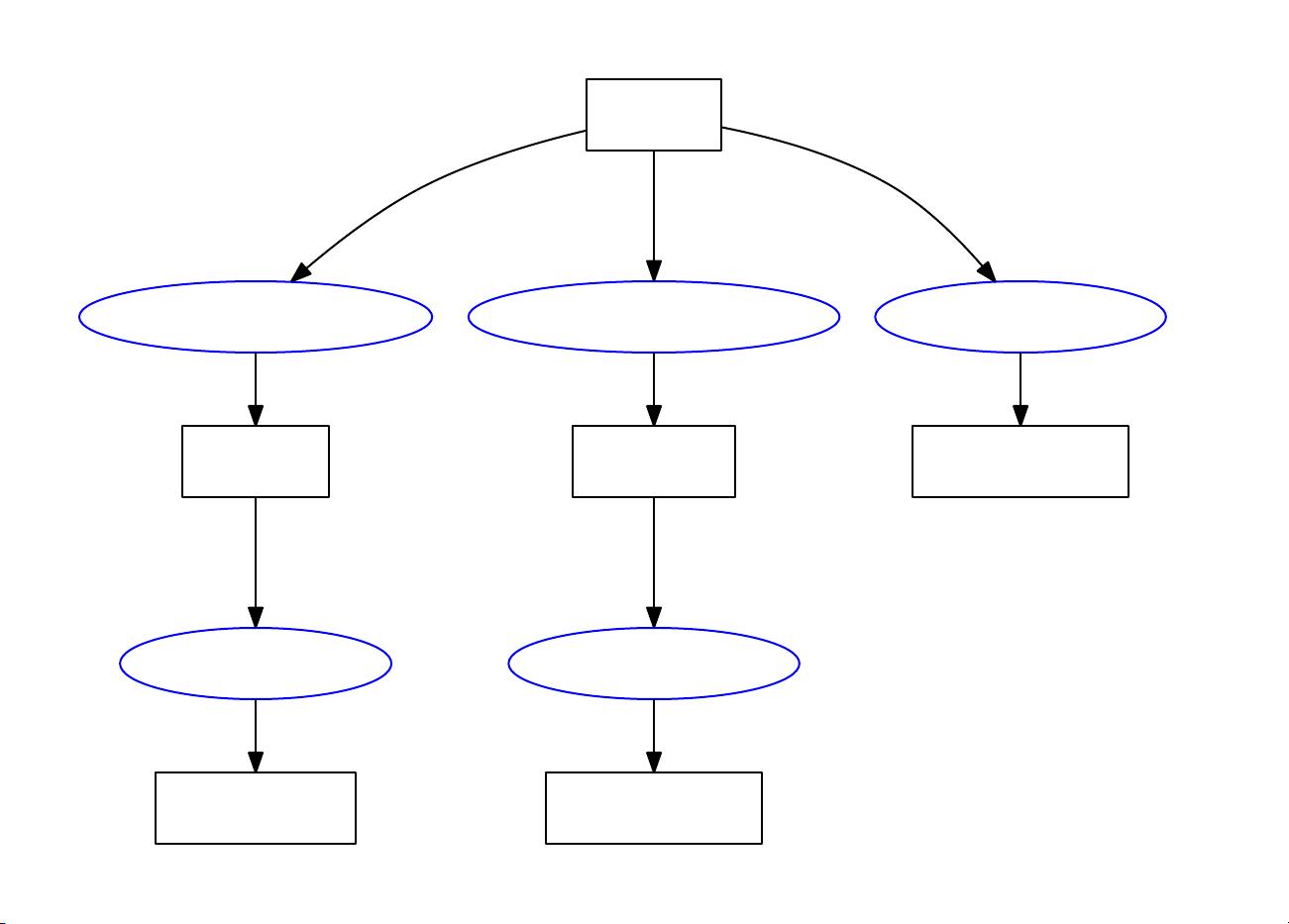
base_link
base_left_motor_joint
xyz: -0.055 0.075 0
rpy: 0 -0 0
base_right_motor_joint
xyz: -0.055 -0.075 0
rpy: 0 -0 0
front_caster_joint
xyz: 0.1135 0 -0.0165
rpy: 0 -0 0
left_motor
left_wheel_joint
xyz: 0 0.0485 0
rpy: 0 -0 0
left_wheel_link
right_motor
right_wheel_joint
xyz: 0 -0.0485 0
rpy: 0 -0 0
right_wheel_link
front_caster_link

















