

IMU(加速度计和陀螺)组合姿态解算
这篇文章主要介绍加速度计和陀螺仪的数学模型和基本算法,以及如何融合这两者,侧重
算法、思想的讨论
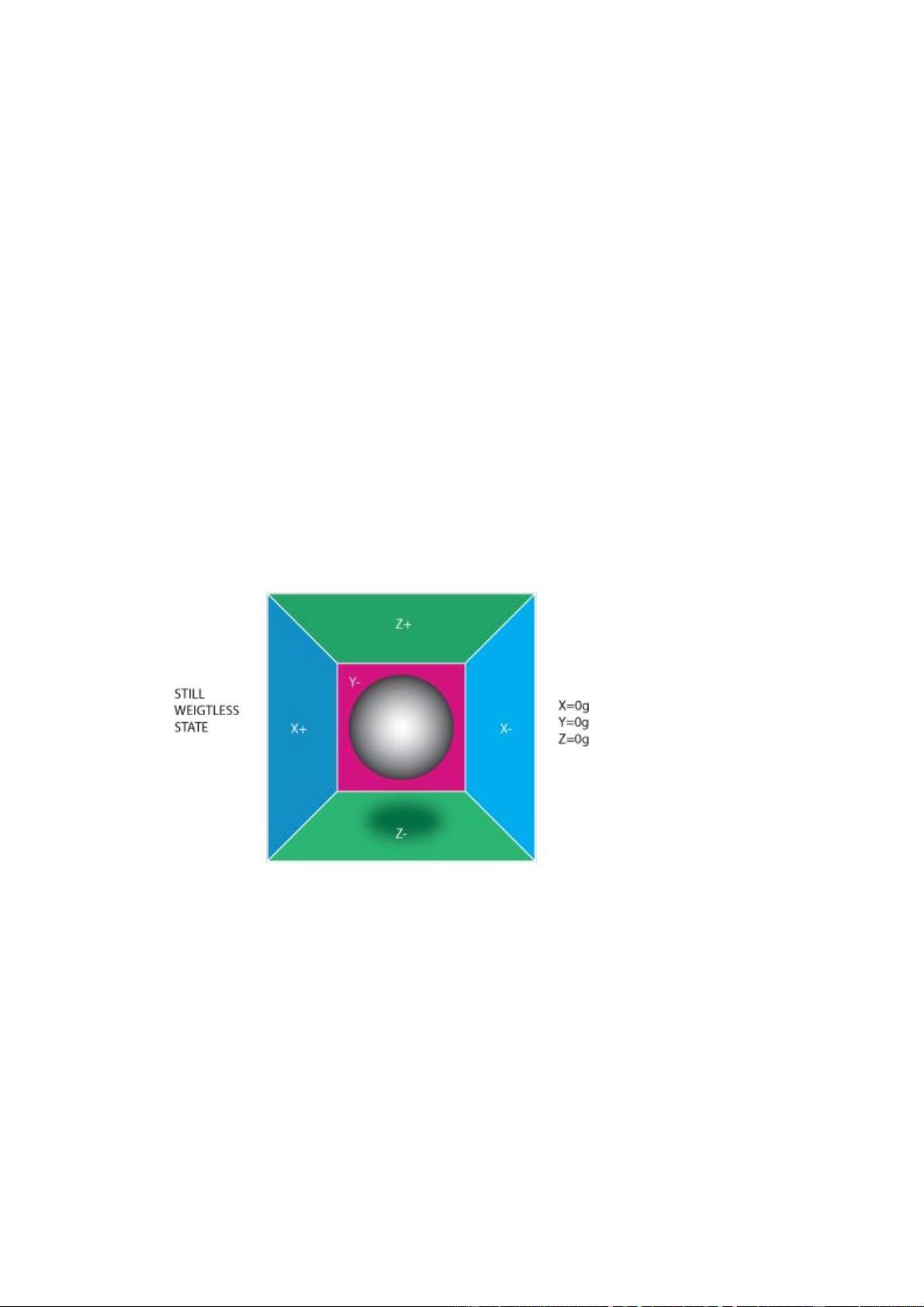
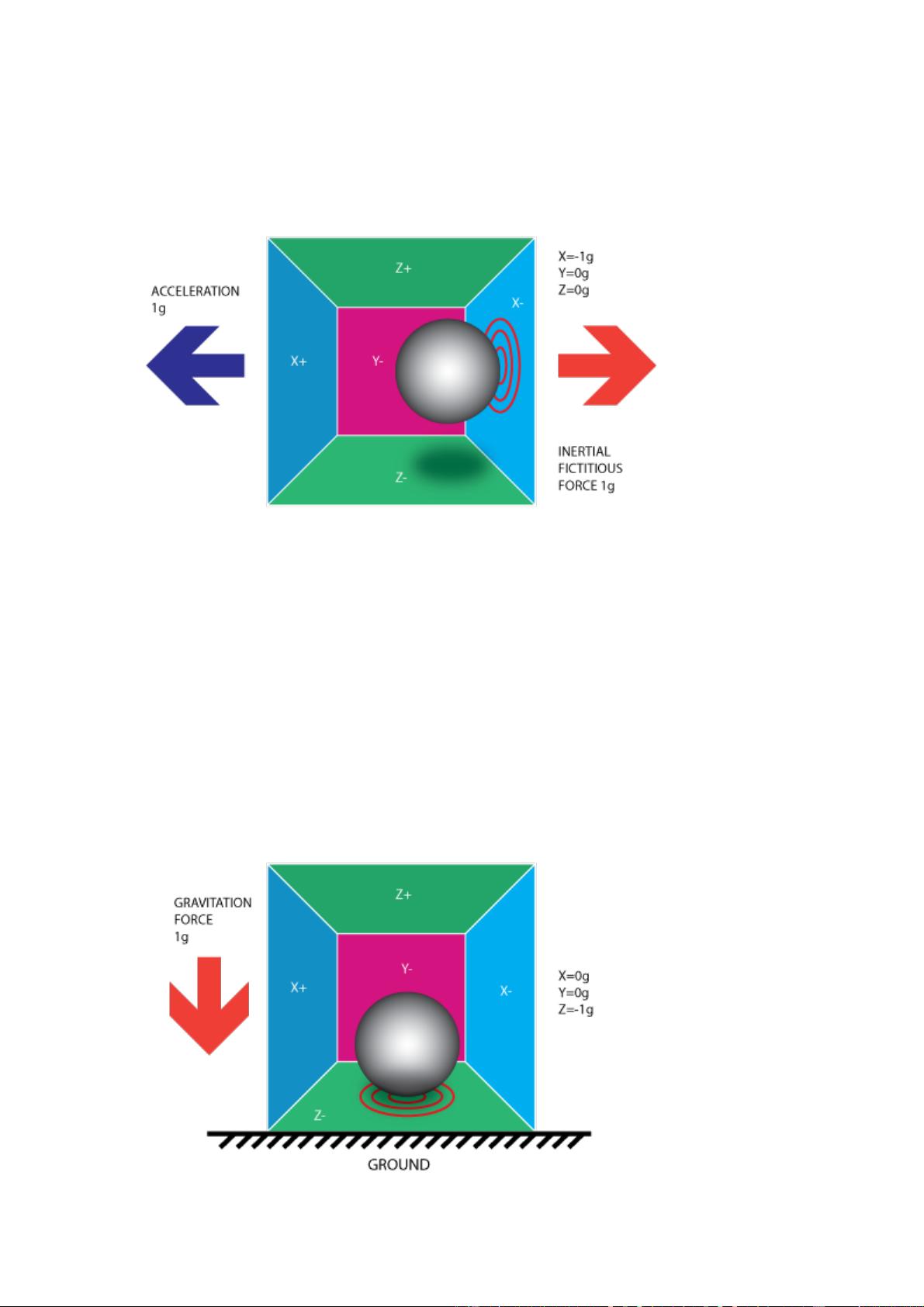
主要思想是:利用加速计计算飞行姿态角,但是加速计在超重或者失重的情况下不准确。
必须经过陀螺仪修正,陀螺仪是测量角速度的,对直线加速度不敏感。使用上一次的融合
值加上这一次的这次的陀螺积分值(注意我们一直在说飞行姿态角度)的到中间值,再和
这次的加速计加权平均,的到姿态的最佳估计值。虽然没有完全解决误差的情况,输出也
不是很准确,但是这是个思路,是入门。将来会有更精彩的算法,文中会提到。
介绍
本指南旨在向兴趣者介绍惯性 MEMS(微机电系统)传感器,特别是加速度计和陀螺仪以
及其他整合 IMU(惯性测量单元)设备。

剩余23页未读,继续阅读
资源评论


weixin_40874498
- 粉丝: 3
- 资源: 6









最新资源
- 基于Python的国产摩托车销售数据分析与应用论文
- 基于粒子群算法优化BP神经网络算法多输出预测 多输入多输出预测 代码含详细注释,不负责 数据存入Excel,替方便,
- 基于Python猫眼电影数据分析可视化系统的设计与实现
- EI复现《高比例清洁能源接入下计及需求响应的配电网重构》 原创代码 使用Matlab+yalmip+mosek求解 代码结构清晰,注释详细,是学习配电网重构的混合整数二阶锥优化绝佳资源 基于混合整数二
- 用 HTML5 Canvas 和 JavaScript 实现流星雨特效
- 操作系统期末复习笔记.docx
- 基于spark的音乐专辑销售数据分析与应用
- 具有自适应动态协议的线性多智能体系统分布式一致性
- 精选毕设项目-简单的商城小应用.zip
- 精选毕设项目-简易计算器.zip
- 精选毕设项目-简易音乐音乐.zip
- 精选毕设项目-交互操作控件.zip
- 精选毕设项目-健康菜谱.zip
- 精选毕设项目-借款申请.zip
- 精选毕设项目-教务系统.zip
- 精选毕设项目-今日头条.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


