
第
17
卷第
5
期
2013
年
5
月
电机与控制学报
ELECTRIC
MACHINES
AND
CONTROL
Vol. 17
No.5
May 2013
基于干扰观测器的磁轴承开关功放延时补偿
范友鹏
刘淑琴
李红伟
张云鹏
代燕杰
2
(1.山东大学电气工程学院,山东济南
250061;
2.
山东电力集团公司电力科学研究院,山东济南
25
∞
14
)
摘
要:为了解决延时引起的磁轴承系统稳定裕度下降问题,针对磁轴承开关功率放大器中存在的
固有延时和可变延时进行了研究,提出了一种利用干扰观测器
(disturbance
observer,
DOB)
理论的
时间延时补偿方法。该方法将开关功率放大器中产生的延时作为扰动项等效到输入端,并构造相
应的干扰观测器模型对扰动项进行估计,实现对磁轴承开关功率放大器的延时补偿。仿真和实验
结果表明,干扰观测器可以有效的降低超调,减小波形滞后失具,提高跟踪性能,从而验证此方法对
于提高系统的动态响应速度是可行有效的。
关键词:磁轴承;开关功率放大器;脉冲宽度调制;时间延时补偿;干扰观测器
中图分类号
:TH
133.
3
文献标志码
:A
文章编号:
1OO7-449X(2013
)05-0103-07
Time delay compensation of switching power amplifier
for magnetic bearing based on DOB
FAN
You-peng
1
,
LIU
Shu-qin
1
,
LI
Hong-wei
1
,
ZHANG
Yun-peng
1
,
DAI
Yan-jie
2
(1.
School
of
Electrical
Engineering
,
Shandong
University
,
Jinan
250061
, China;
2.
Electric
Power
Research
Institute
of
Shandong
Electric
Power
Company
,
Jinan
250014
, China)
Abstract
: Time delay in magnetic bearing system declined the stability margin.
In
order to solve
the
prob-
lem
, constant delay and variable delay of switching power amplifier were studied, and a time delay com-
pensation method based on disturbance observer
(DOB)
theory was presented.
In
this method, time de-
lay caused by switching power amplifier was transferred to the input of the system as disturbance source.
and the corresponding disturbance observer model was constructed
, which realized time delay compensa-
tion in switching power amplifier. Simulation and experimental results show that the overshoot
and
wavefor
distortion are effectively reduced
, and the tracking
perfo
口
nance
is improved , which verified the feasibility
and effectivity for improving the dynamic response of system.
Key
words:
magnetic bearing; switching power amplifier; PWM; time delay compensation;
disturbance observer
收稿日期:
2012
-07 -20
基金项目:国家自然科学基金
(51075236
,
51105231)
;山东省自然科学基金
(ZR2
012EEM031
,Z
R2
011EE
Q0
29)
;山东省优秀中青年科学家科研
奖励基金
(BS2012DX013
)
作者简介:范友鹏(1
984
一)
,男,博士研究生,研究方向为磁悬浮轴承功率放大器及其控制技术;
刘淑琴(1
958
一)
,女,博士生导师,研究方向为磁悬浮技术及其应用,垂直轴风力发电机纽;
李红伟(1
979
一)
,男,博士,讲师,研究方向为磁悬浮轴承理论及应用;
张云鹏
(1981
一)
,男,博士,讲师,研究方向为磁悬浮轴承理论及应用;
代燕杰(1
983
一)
,女,硕士,研究方向为电能计量。
通讯作者:刘淑琴
剩余6页未读,继续阅读
资源评论


weixin_38518958
- 粉丝: 0
- 资源: 883









最新资源
- 基于java的生产制造管理系统设计与实现.docx
- 基于java的同城宠物喂遛系统设计与实现.docx
- 基于java的体育场馆管理网站设计与实现.docx
- 基于java的无人超市管理系统设计与实现.docx
- 基于java的项目申报管理系统设计与实现.docx
- 基于java的小区智能卡管理系统设计与实现.docx
- 基于java的物业管理系统设计与实现.docx
- 基于java的校园服务平台设计与实现.docx
- 基于java的校园求职招聘系统设计与实现.docx
- 基于java的校园失物招领网站设计与实现.docx
- 3.0版-聊天业务实现.7z
- 基于java的学生综合素质评价系统设计与实现.docx
- 基于java的校园志愿者管理系统设计与实现.docx
- 基于java的新能源充电系统设计与实现.docx
- 基于java的医院急诊系统设计与实现.docx
- 基于java的养老院管理系统设计与实现.docx
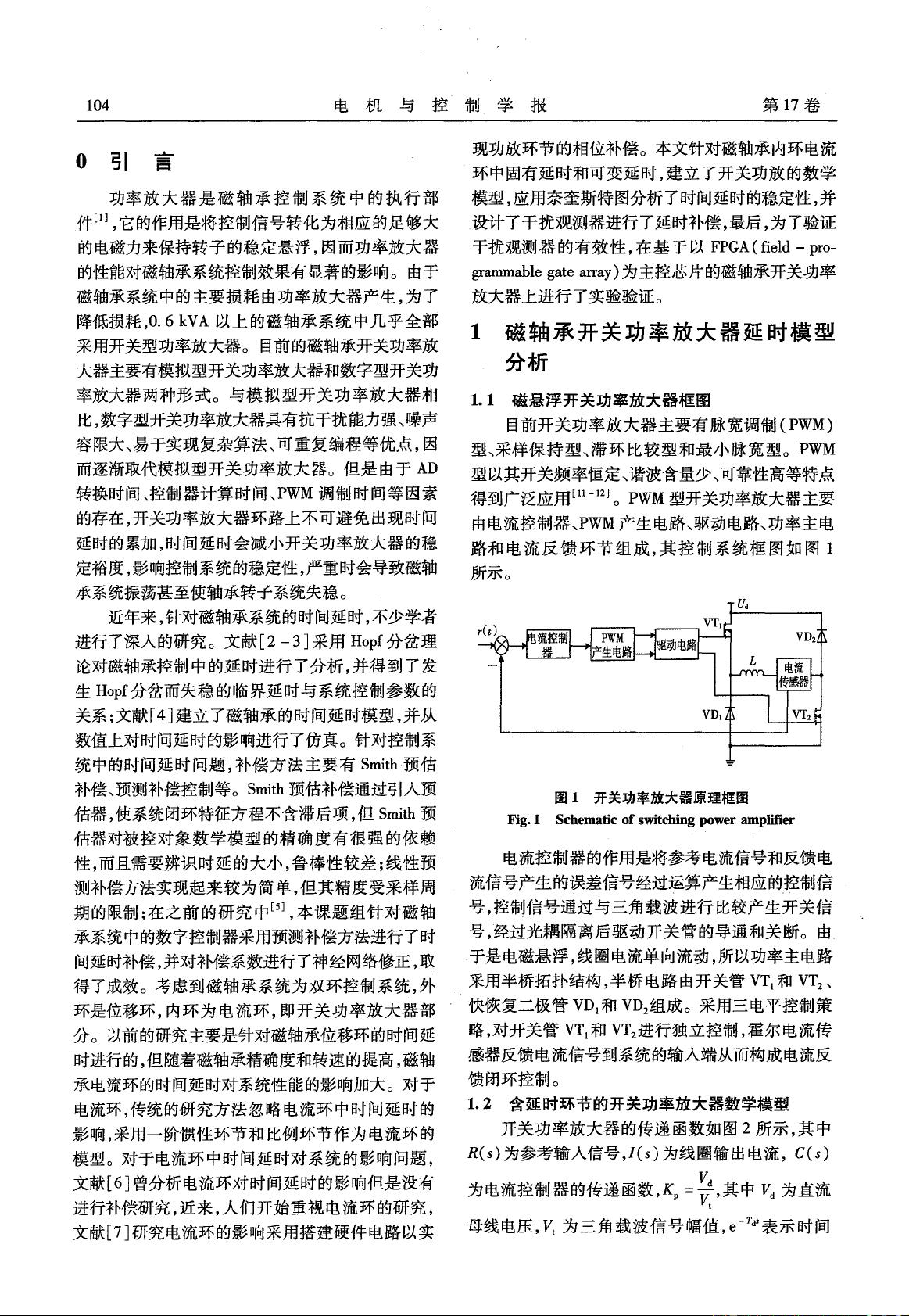
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


