ABSTRACT
Over the past twenty years, robot technology is developing very rapidly,
robots are widely in all fields of various kinds of purposes
For the application. This graduation design with integrated PLC motion
controller XDM as robot controller, develop a new type of spherical
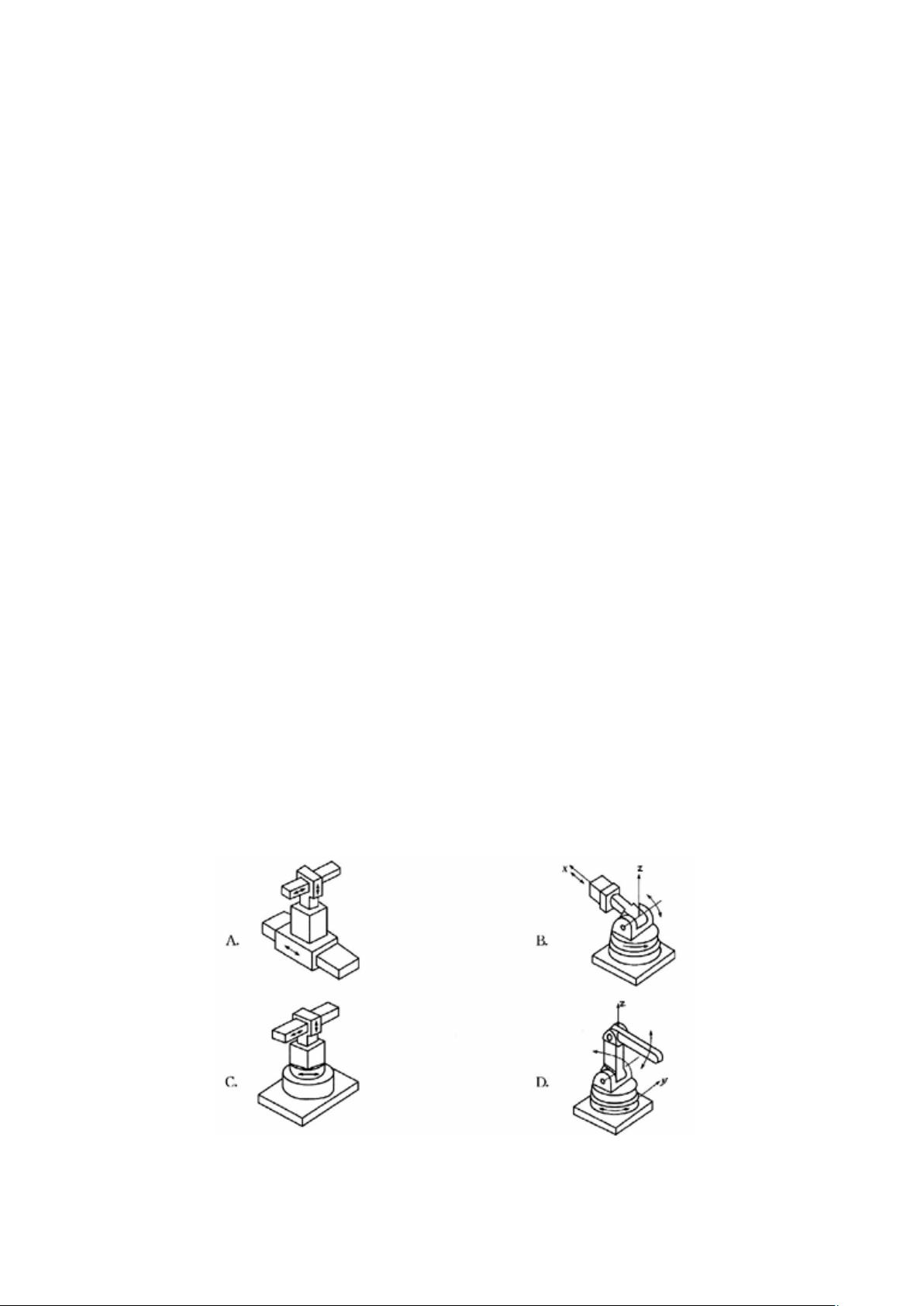
coordinates industrial robots. According to the spherical coordinates
technical characteristics and requirements of the industrial robot, put
forward the overall design, determine the design of the robot coordinate
form and freedom degrees; Choose the appropriate speed reducer and servo
motor, using the INVENTER software design three-dimensional digital model
of the industrial robot, and draw the assembly drawing.
Use AutoCAD Electrical to design control circuit diagram; Choose
industrial robots motion controller based on PLC as controller, using
touch screen system as the teaching of the robot
Keywords: industrial robot, robot, PLC