基于PLC的四自由度电动机械手的控制设计.docx
版权申诉
92 浏览量
2023-09-13
14:22:33
上传
评论
收藏 858KB DOCX 举报


基于 PLC 的四自由度电动机械手的控制设计
摘 要:所介绍的电动机械手由电控机械手、
yz
轴丝杠组、手转动机构、旋转底盘等机械部分组成,在 PLC
控制下,它可在行程范围内将物体从一点搬运至另一任意点,可置放于各种不同生产线或物流流水线中。
关键词:机械手;PLC;步进电机
中图分类号:TP241 文献标志码:A
文章编号:
Design of the Control System of 4-dimension Motor-driven Mechanical Manipulator
Based on PLC
Abstract: Motor-driven mechanical manipulator disscussed in this paper consists of
power-operated mechanical manipulator,y-axis and z-axis screw lever modules ,rotatry
mechanism of manipulator,rotated-plate at the bottom etc. On the control of PLC system,it
can take bodies from one place to another in the range of its journey. It can be placed on
different manufacture assembly lines or goods circulation lines.
Key Words:mechanical manipulator; PLC; step motor
随着微电子技术、计算机和现代控制理论的不断完善,机械手技术也快速发展。按实现功能和驱动方
式划分,机械手可以分为很多种。仅就驱动方式,就有气动(或液动)、电动和电气混合等。为实现不同
的功能,有 3 个自由度的,也有 4、5 个自由度的,甚至还有 6 个自由度的。本文中,笔者仅论述基于 PLC
技术的 4 个自由度电动机械手的控制设计,它能满足绝大多数场合的搬运需要,并且可用于教学实验,具
有良好的示范性和教学性。
1 4 轴联动简易机械手的结构及动作过程
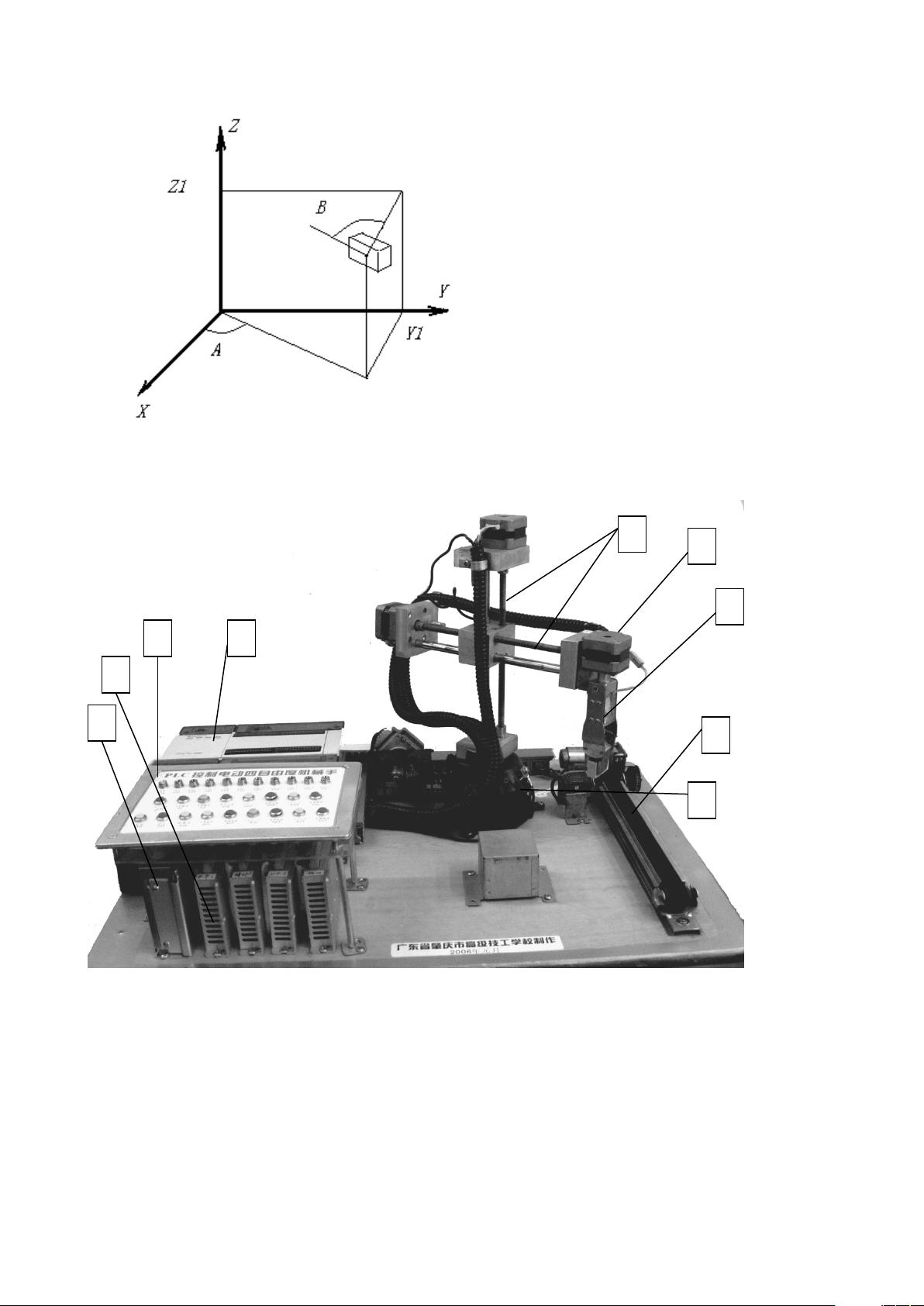
如图 1 所示,搬运一个零件,一般需要 4 个自由度确定其位置:3 个坐标确定其空间位置;1 个角度
坐标确定其摆放方位。本文中确定空间位置的 3 个坐标分别是角度 A
、
Y 轴坐标 Y1 和 Z 轴坐标 Z1;摆放
方位(方位角)由零件长度方向的轴线与 X 轴形成的夹角 B 确定。通常情况下,4 个自由度的机械手即可
满足大多数搬运需求。
4 个自由度电动机械手的结构如图 2 所示。它由电磁铁控制的机械手 1、
YZ
轴丝杠组 2、手转动机构
3、旋转底盘 4、物料输送带 5、PLC 6、控制面板 7、步进电机驱动器 8 和 24V 电源 9 等组成。
剩余19页未读,继续阅读
资源评论


南抖北快东卫
- 粉丝: 70
- 资源: 5584

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- ZEND解密dezender12
- sony 索尼IMX334摄像头模组电路板AD版硬件PCB图(6层板).zip
- 基于flask和echarts融合交易策略的bitfinex可视化微服务.zip
- 包含了wvp-assist.tar wvp-talk.tar zlmediakit.tar .
- 3r4efgh53wgrf43tw
- 2024新版Java基础从入门到精通全套视频+资料下载
- Spring AI大模型视频教程+ChatGPT视频教程+OpenAI大模型视频教程(资料+视频教程)
- ABB工业机器人教程PDF版本
- 123321123323211
- 三相桥式全桥整流电路MATALB Simulink仿真文件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


