基于PLC的四自由度机械手控制系统设计.docx
版权申诉


基于 PLC 的四自由度机械手控制系统设计
目 录
第 1 章 基于 PLC 的四自由度机械手控制系统设计
1.1 基于 PLC 的四自由度机械手控制系统设计分析
…………………… ..(1)
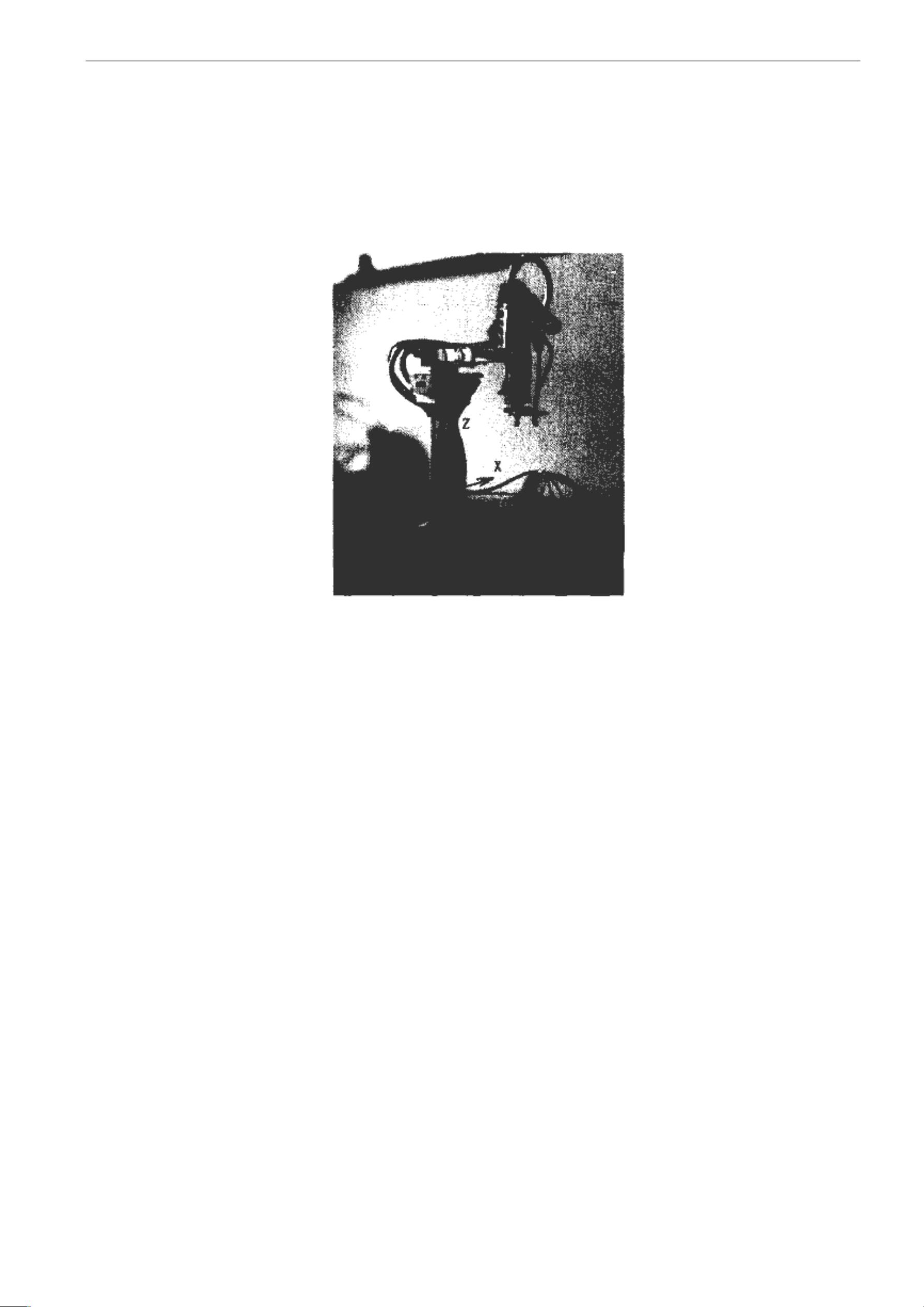
1.2 机 械 手 基 本 结 构 与 控 制 任 务 … … … … … … … … … … … … … … … … … . ( 1 )
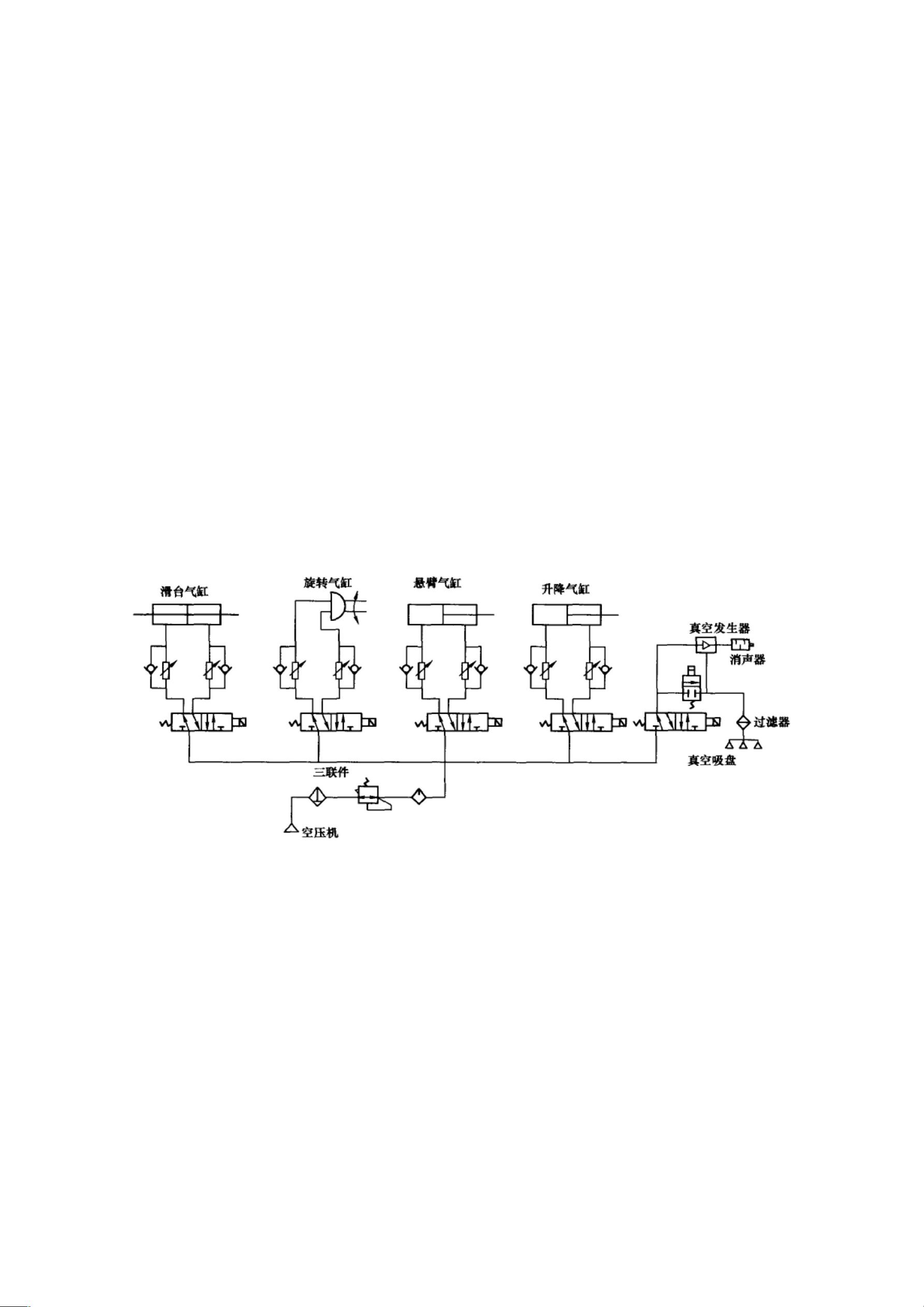
1.3 机 械 手 气 动 系 统 设 计 … … … … … … … … … … … … … … … … … … … … . ( 2 )
第 2 章 基于 PLC 的四自由度机械手控制系统硬件设计
2.1.0 FX -2N 系 统可编 程控制 器简 介……… ……… …… … ……… ……… .( 3)
2.1. 1 可 编 程 控 制 器 可 编 程 控 制 器 的 产 生 … … … … … … … … … … … … … . ( 3 )
2.1. 2 可 编 程 控 制 器 的 定 义 … … … … … … … … … … … … … … … … … … … . ( 3 )
2.1. 3 可 编 程 控 制 器 的 发 展 趋 势 … … … … … … … … … … … … … … … … … . ( 5 )
2.1. 4 可 编 程 控 制 器 的 特 点 … … … … … … … … … … … … … … … … … … … . ( 6 )
2.1. 5 可 编 程 控 制 器 的 主 要 功 能 … … … … … … … … … … … … … … … … … . ( 7 )
2.1.6 PLC 的基本结构 ………………………………………………………
2.1.7 PLC 各部分的作用 ……………………………………………………
2.1.8 气动技术介绍 …………………………………………………………
2.1.9 压缩空气的特性 ………………………………………………………
2.2.0 简单的气动系统 ………………………………………………………
2.2.1 气动元件 ………………………………………………………………
.(8)
..(9)
..(11)
..(11)
..(11)
..(12)
第 3 章 基于 PLC 的四自由度机械手控制系统软件设计
3.1 输入/ 输出分配表 ………………………………………………………
3.2 PLC 外部接线图 …………………………………………………………
3.3 机械手 PLC 程序设计 ……………………………………………………
3.4 PLC 程序设计 ……………………………………………………………
.(13)
.(14)
.(15)
..(17)
致谢
参考文献
第1页 共21页


剩余20页未读,继续阅读
资源评论

 egeg8102024-01-09非常有用的资源,有一定的参考价值,受益匪浅,值得下载。
egeg8102024-01-09非常有用的资源,有一定的参考价值,受益匪浅,值得下载。- ANSWERyourself2023-04-18资源内容详细全面,与描述一致,对我很有用,有一定的使用价值。












