"PLC控制伺服电机的方法"
本文将详细介绍PLC控制伺服电机的方法,以松下Minas A4系列伺服驱动器为例。伺服电机控制方法有三种:速度控制、位置控制和转矩控制。下面将简要介绍位置模式的控制方法。
一、PLC控制伺服电机的硬件连接
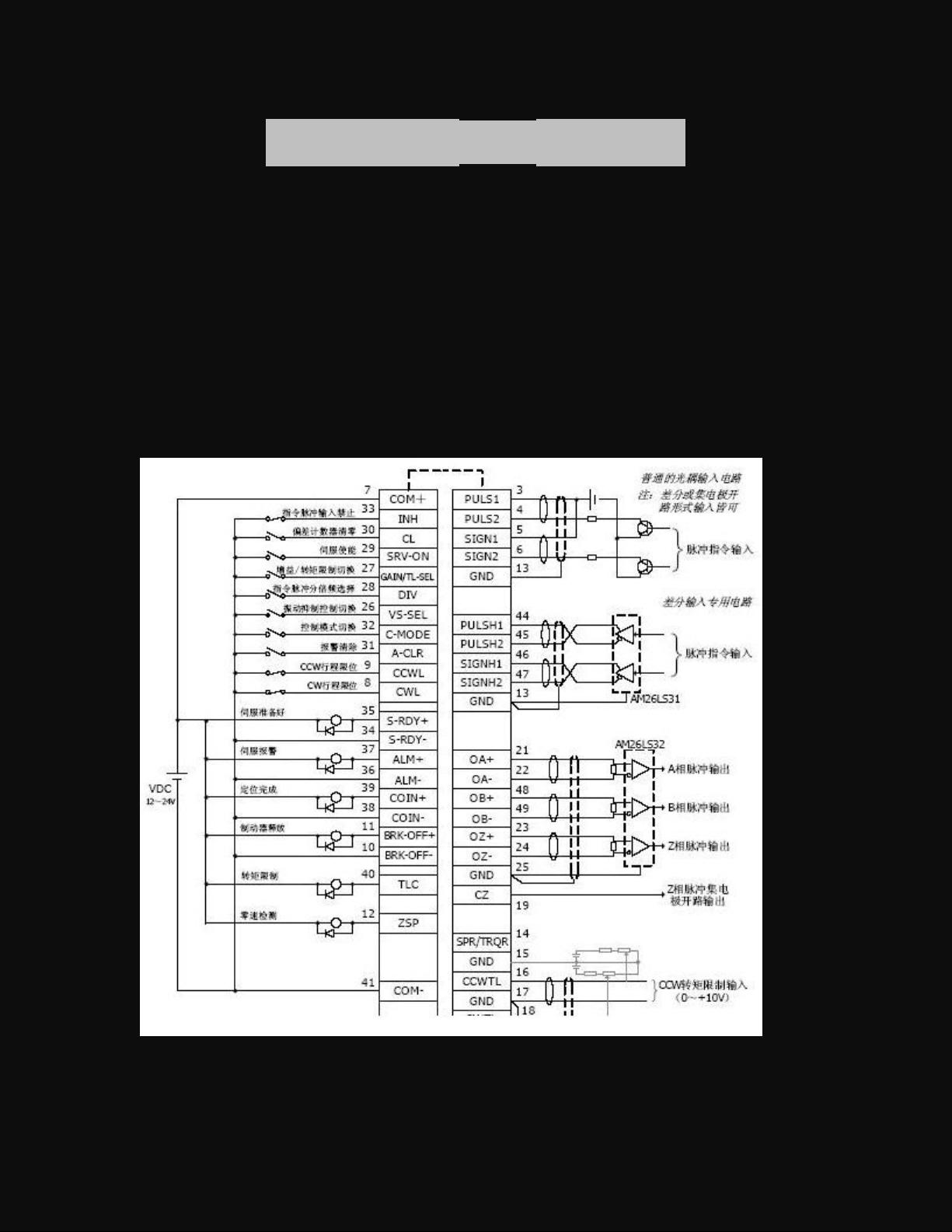
在PLC控制伺服电机之前,需要连接相关的硬件。伺服电机驱动器的端子有:
* 3(PULS1)和4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。
* 5(SIGN1)和6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。
* 7(com+)与外接24V直流电源的正极相连。
* 29(SRV-0N)为伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态。
二、设置伺服电机驱动器的参数
1. Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3和4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。
2. Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。
3. Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。
4. Pr41,Pr42----简单地说就是控制伺服电机运转方向。Pr41设为0时,Pr42设为3,则5(SIGN1),6(SIGN2)导通时为正方向(CCW),反之为反方向(CW)。
5. Pr48,Pr4A,Pr4B----电子齿轮比设定。此为重要参数,其作用就是控制电机的运转速度与控制器发送一个脉冲时电机的行走长度。
伺服电机每转一圈所需的脉冲数=编码器分辨率×Pr4B/(Pr48×2^Pr4A)
例如,如果伺服电机所配编码器为2500p/r5线制增量式编码器,则编码器分辨率为10000p/r。如果连接伺服电机轴的丝杆间距为20mm,您要做到控制器发送一个脉冲伺服电机行走长度为一个丝(0.01mm)。计算得知:伺服电机转一圈需要2000个脉冲。(每转一圈所需脉冲确定了,脉冲频率与伺服电机的速度的关系也就确定了)
三、PLC程序的编写
在设置好伺服电机驱动器的参数后,编写PLC程序以控制伺服电机的运转。PLC输出脉冲频率=(速度设定值/6)*100(HZ)。
本文详细介绍了PLC控制伺服电机的方法,包括硬件连接、参数设置和PLC程序的编写。通过设置好伺服电机驱动器的参数和编写PLC程序,我们可以控制伺服电机的运转。








评论0
最新资源