
控制理论与应用
Q垒垒!!Q!!b金Q!Y曼Qg垒巳巳!l垒垒!lQD§
《自动化技术与应用》2007年薨26卷第l期
L
Q
R控制与P
I
D控制在单级倒立摆中的对比研究
刘瑕.梁昔明
(中南大学信息科学与工程学院,湖南长沙410083)
摘要:本文在单级倒立摆系统模型的基础上,介绍设计LQR控制器和PID控制器的基本原理,并通过对单级倒立摆系统的控制仿真
实验对比研究两种控制方法,给出了相应的结论。
关键词:LQR控制;PID控制;倒立摆;MATLAB仿真
中图分类号:TPl3
文献标识码:A
文章编号:1003
724l(2007)0卜0013
03
COmpa
risOn
Study
Of
LQR
and
PI
D
COntrOI
On
a
SingIe
InVerted
PendUIum
LIU
Jing,LIANG
Xi-ming
(school
of
hIfolmation
science
aIld
EIlgiIleedng,Cen缸al
sou血UmV喇哆,CllaIlgsha
410083,ctliIla)
Abstract:This
paper
presents
the
basic
principIes
for
designing
LQR
controlIer
and
PID
controIler.SimuIation
tests
of
these
two
methods
on
a
single
inVerted
pendulum
system
are
giVen.
Key
words:LQR
control,PID
control,invened
pendulum,MATLAB
simulation
1引言
线性二次型最优控制设计是基于状态空间技术设计一个优
化的动态控制器。线性二次型调节器【1,2,3】(Linear
Quadratic
Re目1】ato卜_I
QR)问题在现代控制理论中占有非常重要的位置,
受到控制界的普遍重视,这是因为它的提法具有普遍意义,它不局
限于某种物理系统,而且人们经过许多试探,证明这样的提法易于
获得解析解,最为可贵的是能获得线性反馈的结构,并且它提供了
一种统一的框架,把经典设计(单变量,非时变)也统一于其中。然
而,和人们熟知的PID控制理论相比,LQR应用范围要小得多。
PID控制【3.4J是自动控制中产生最早、应用最广的一种控制方法。
PID控制在实际控制工程中应用最广,据不完全统计,在工业过程
控制,航空航天控制等领域中,PID控制的应用占80%以上。这是
因为PID控制器结构简单,软硬件实现方便、快速,便于调节,有
较好的控制效果并目.对模型误差有较好的鲁棒陛。
本文在单级倒立摆系统的基础上,具体对比研究这两种控制
方法。在下面的第二节将介绍单级倒立摆的数学模型;第三节介
绍LQR控制器和PID控制器的设计方法;第四节进行LQR控制器
和PID控制器在单级倒立摆系统下的仿真研究;最后总结本文并
给出结论。
收稿日期:2
0
06—0
5一l 2
2倒立摆的数学模型
倒立摆系冽1’习的控制问题被公认为控制理论中的一个典型
问题,许多新的实时控制理论都经过倒立摆控制实验来加以验证。
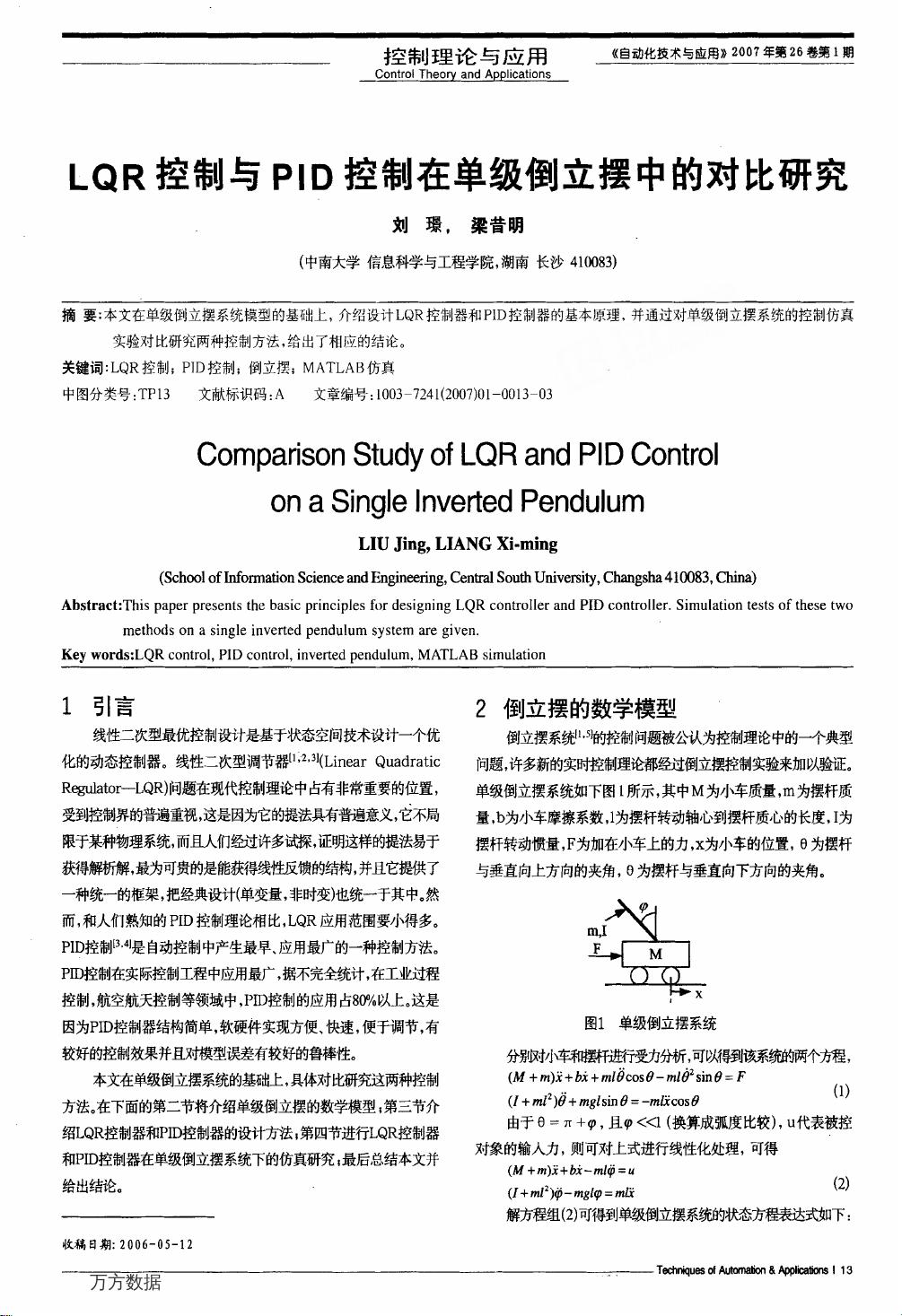
单级倒立摆系统如下图l所示,其中M为小车质量,m为摆杆质
量,b为小车摩擦系数,1为摆杆转动轴心到摆杆质心的长度,I为
摆杆转动惯量,F为加在小车上的力,x为小车的位置,e为摆杆
与垂直向上方向的夹角,9为摆杆与垂直向下方向的夹角。
图1单级倒立摆系统
分男收寸,j嘻琅曜籽进行受力分析,可以删该系统的两个方程,
(M+m)量+撕+,行f舀cos口一mz毋2
sinp=F
,1、
(,+小z2)痧+m∥sin侈=一m饯cos矽
、1
7
由于0=丌+妒,且9<<l(换算成弧度比较),u代表被控
对象的输入力,则可对上式进行线性化处理,可得
Ⅲ+m)置+城一m坤~
㈨
(,+mf2)舻一棚苫却=m反
、‘7
解方程组(2)可得到单级倒立摆系统的状态方程表达式如下:
万方数据
资源评论













