安装Ubuntu20.04+ROS+Cartographer
一、使用4GB以上空间的U盘制作系统盘
参考:(9条消息) Win10系统下安装Ubuntu系统(双系统)win10
下安装
ubuntu_Dr.sky的博客-CSDN博
客
二、win10设置分区
重新安装点击 删除卷 就行,不需要点击 扩展卷
三、电脑BIOS设置
1.开机快速多次点击F2进入BIOS设置
2.检查是否允许打开 USB设置
3.开机顺序 U盘 放在第一个
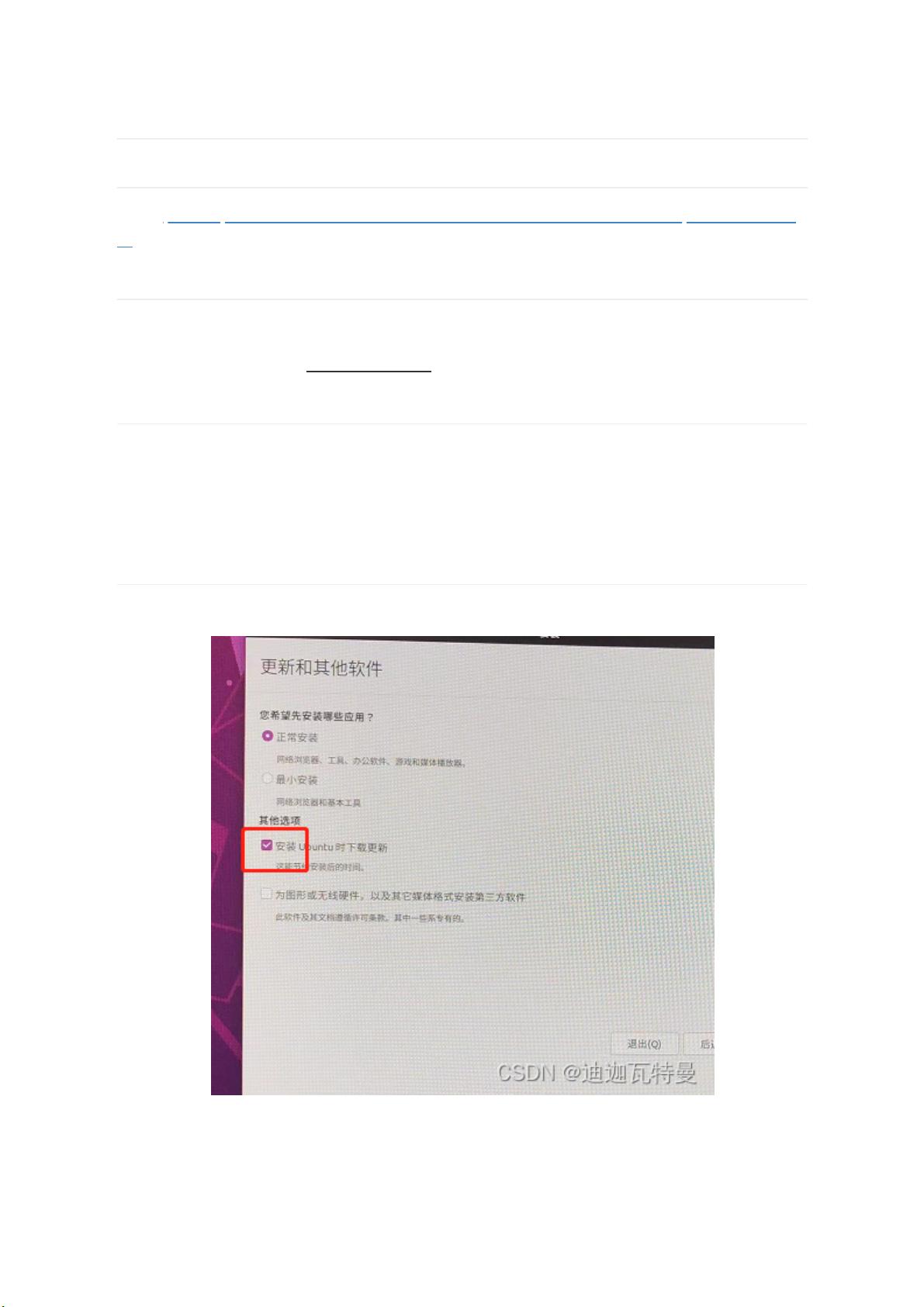
四、开始安装Ubuntu系统(重要:全程接一根网线)
注意这一步:
磁盘分区:(以1TB为例子)