
- -.
ABB
机器人简单操作指南
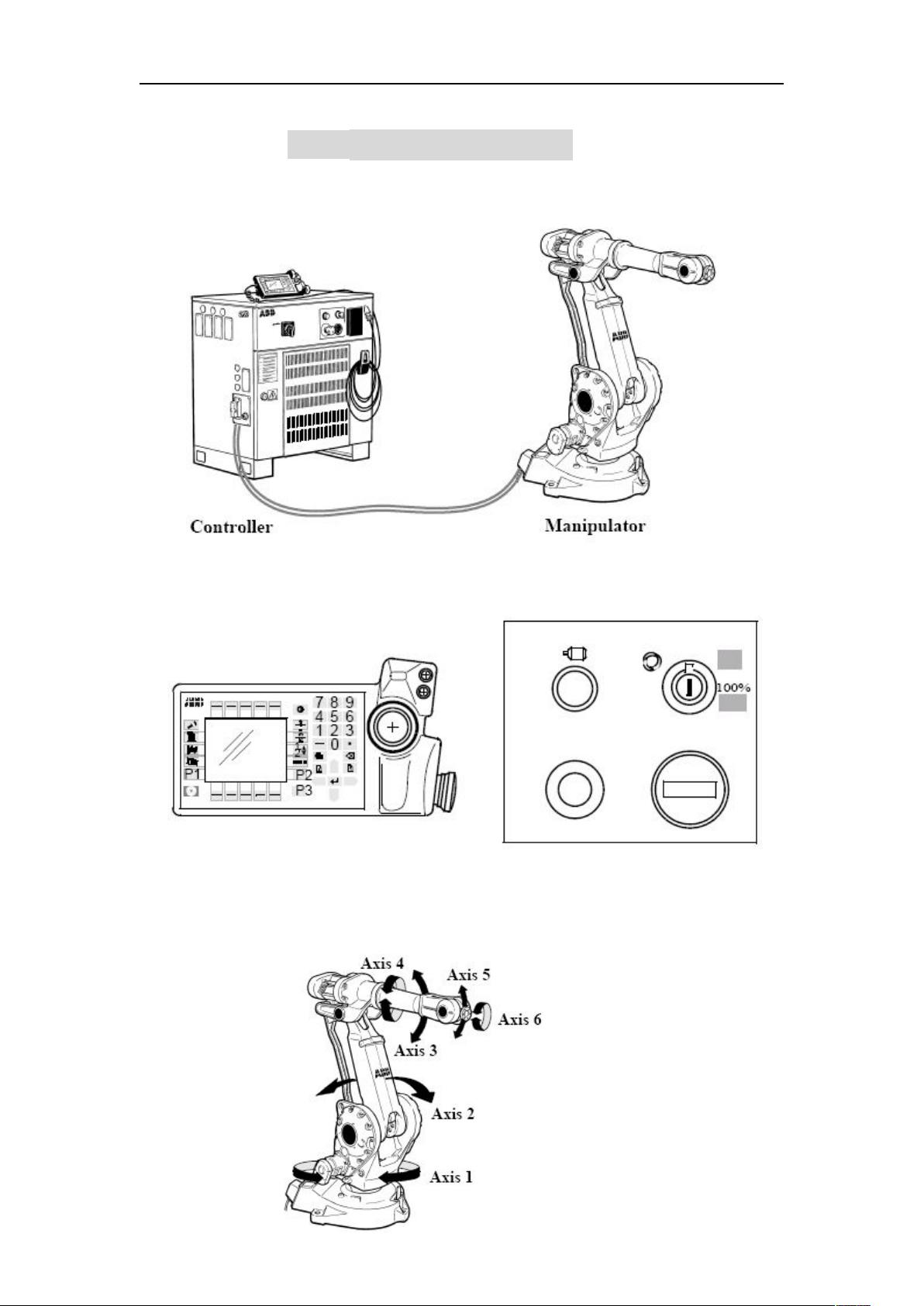
1 机器人主要由以下两部分组成
控制柜 机械手
控制柜和机械手之间由两条电缆连接
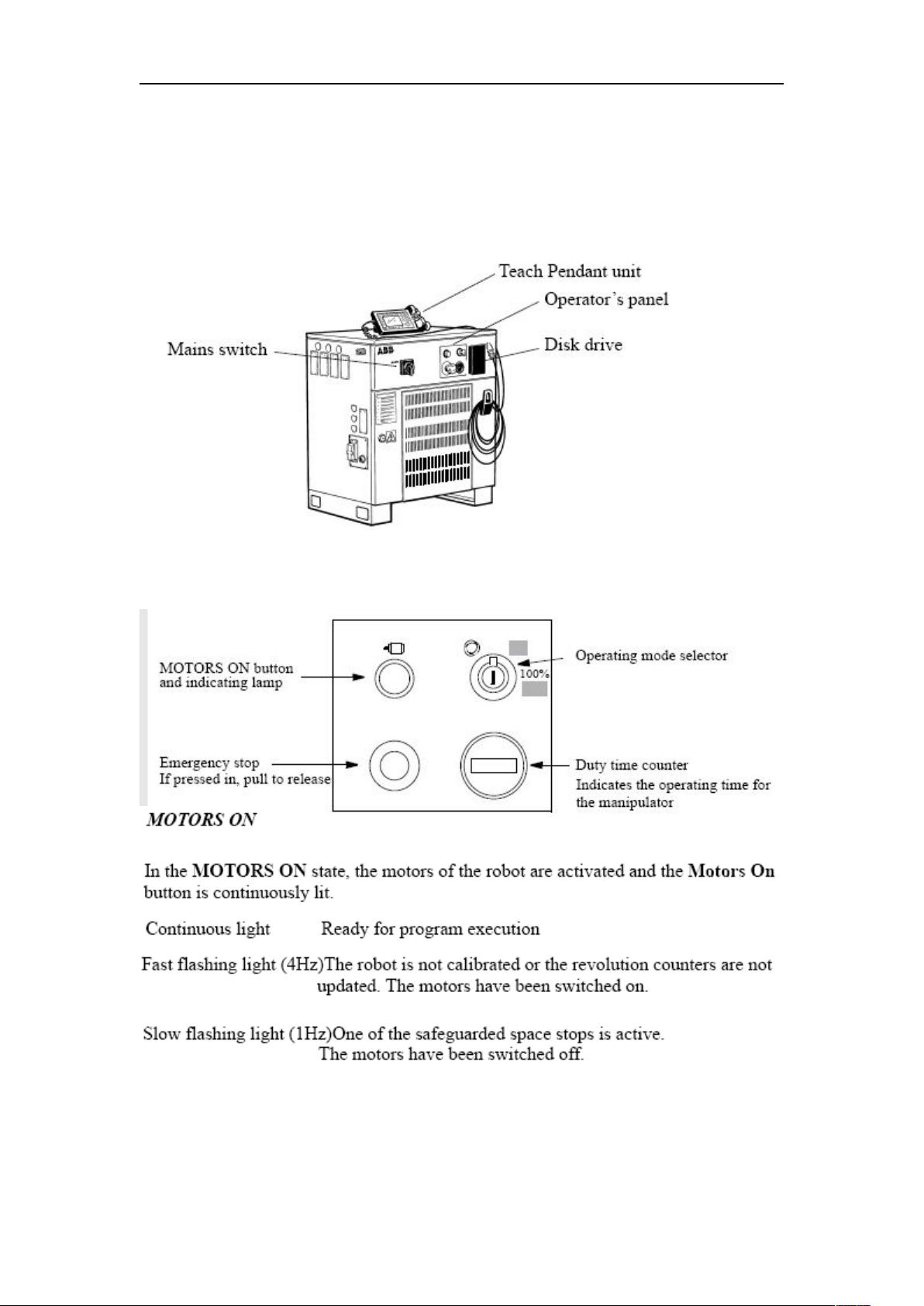
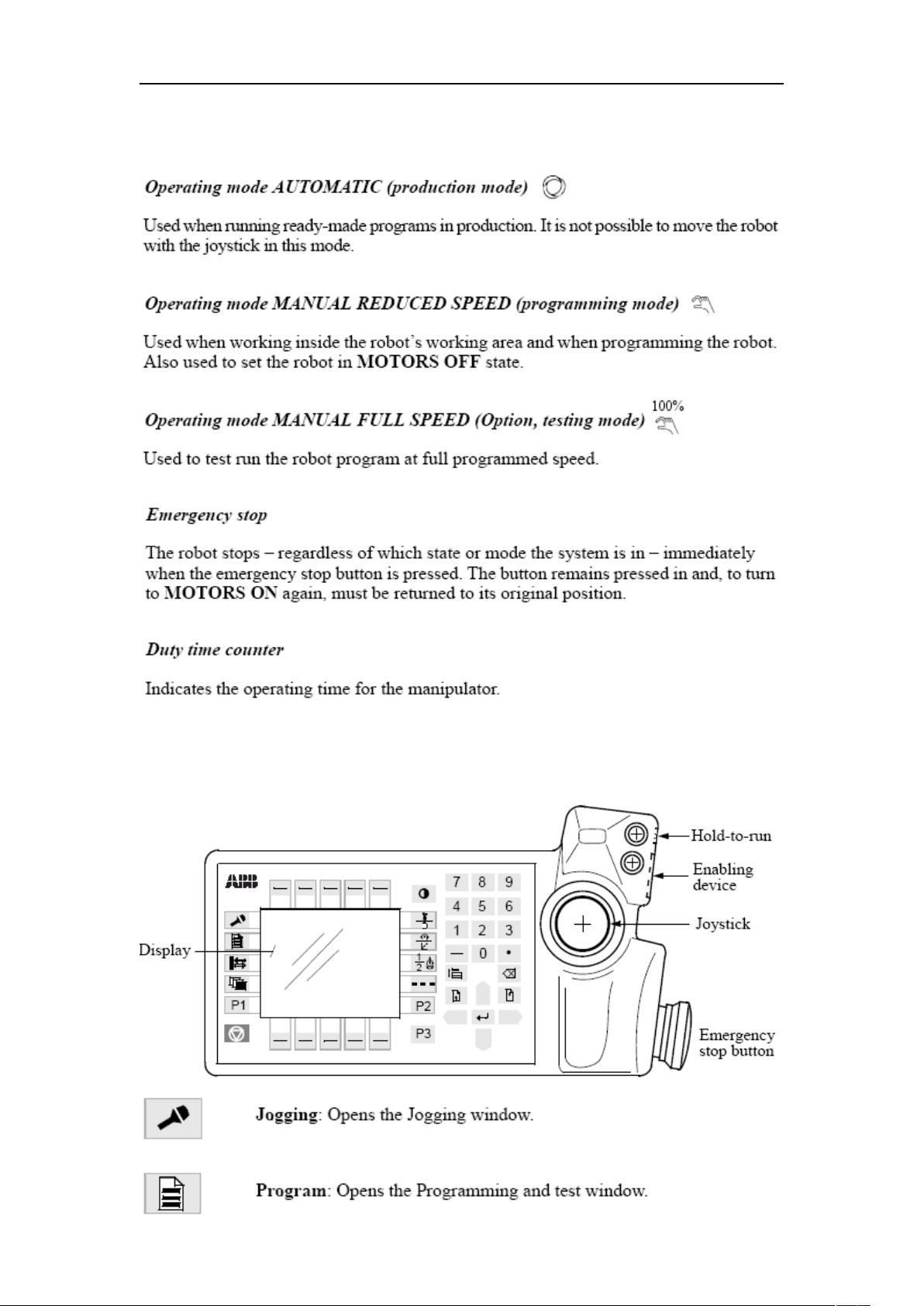
可以用示教器或位于控制柜上的操作盘来控制机械手,见下图
2 机械手
下图显示了机械手上不同的轴的可移动的方向
- - 总结
剩余14页未读,继续阅读
资源评论


pyhm63
- 粉丝: 9
- 资源: 20万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- Vue vs Angular:2024 年选择哪个框架
- 宽带账户密码生成器(获取上网帐号密码并自动保存到D盘)
- 防毒面具检测54-YOLO(v5至v9)、COCO、Darknet、VOC数据集合集.rar
- 算法(第4版).pdf
- 360占用解除器.rar
- 面试题记录1111111111111111111111111111111111111111111
- 大规模语言模型的查询语言:编程即提示
- 深度学习课设-基于resnet网络实现鼠标手写数字识别源码+数据集+模型+运行说明(带GUI界面,直接界面上手写).zip
- 蓝桥杯算法训练平台.zip
- 防护服检测40-YOLO(v5至v9)、COCO、CreateML、Darknet、Paligemma、TFRecord、VOC数据集合集.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


