
1
PnP 标定
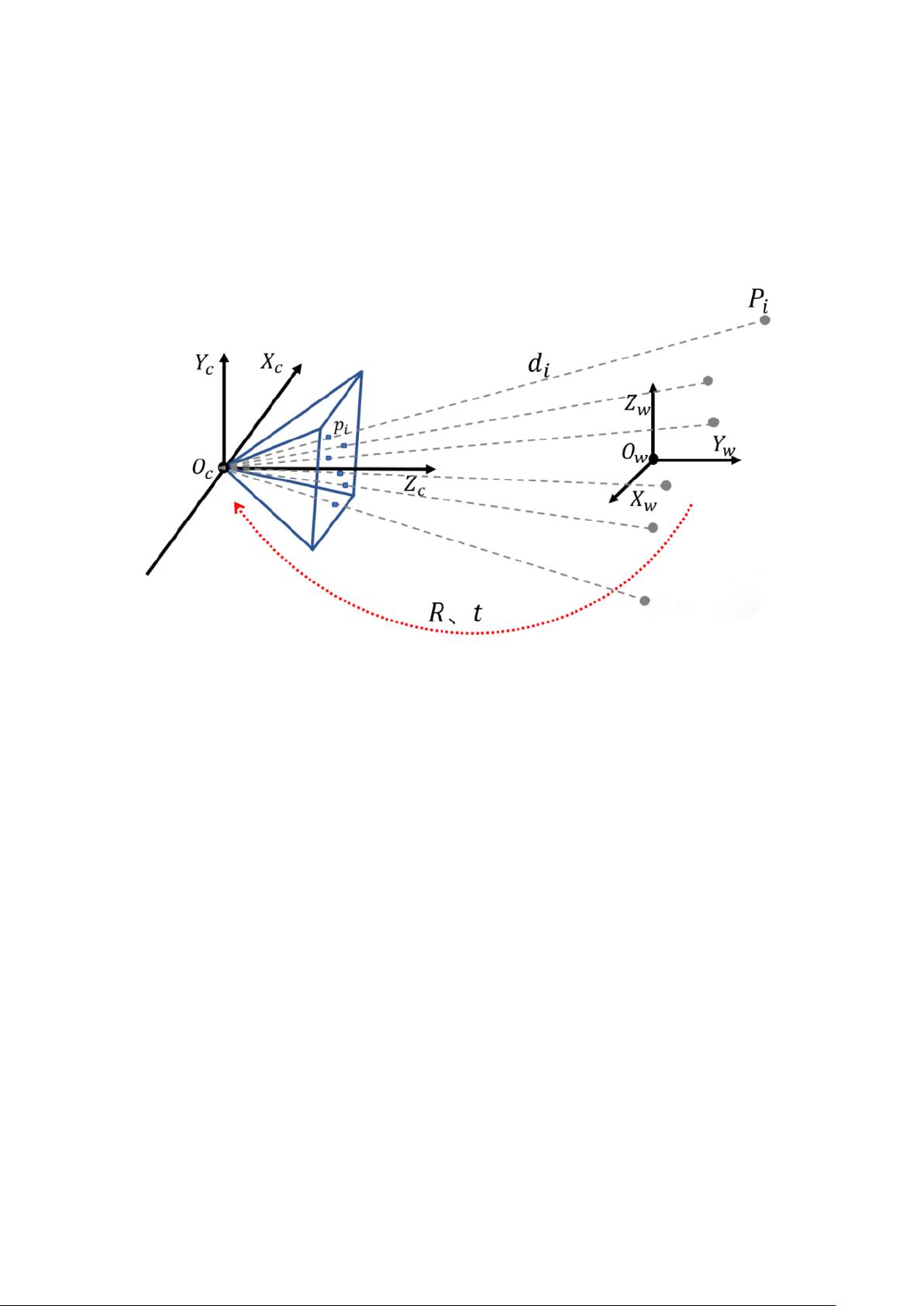
PnP 问题的几何结构如下图所示,给定 3D 点的坐标以及对应 2D
点的坐标以及内参矩阵,求解相机的姿态。
已知:n 个点在世界坐标系下的坐标
ni
、
P
、、
P
、、
PP ��
21
,对应的像
素坐标是
ni
、
p
、、
p
、、
pp ��
21
,相机的内参设为 K。
求解:相机坐标系
� �
cccc
ZYXO
相对于世界坐标系
� �
wwww
ZYXO
的位姿,
其转换关系是如下所示:
� �
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
w
w
w
c
c
c
Z
Y
X
R t
Z
Y
X
方法一:DLT 直接线性变换法
假 设 : 相 机 是 经 过 标 定 , 也 即 相 机 的 内 参 K 是 已 知 的 ,
�
�
�
�
�
�
�
�
�
�
�
100
0
0
yy
xx
cf
cf
K
。

剩余11页未读,继续阅读

ASDWYang
- 粉丝: 358
- 资源: 20









最新资源
- Windows检查电池健康度的批处理脚本实现
- 用HTML5和JavaScript实现动态过年鞭炮场景
- 快速排序在Go中的高效实现与应用
- 对象检测23-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 云原生-k8s知识学习-CKA考前培训
- Python实现HTML压缩功能
- 完结26章Java主流分布式解决方案多场景设计与实战
- ECSHOP模板堂最新2017仿E宠物模板 整合ECTouch微分销商城
- Pear Admin 是 一 款 开 箱 即 用 的 前 端 开 发 模 板,提供便捷快速的开发方式,延续 Admin 的设计规范
- 51单片机仿真摇号抽奖机源程序12864液晶显示仿真+程序
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0