相机标定实验报告
版权申诉

相机标定
一、实验原理
相机标定就是求解相机的内参数以及畸变参数的过程。
相机的标定主要有两种:传统的摄像头标定方法和摄像头自标定方法,典型
的有:(1)Tsai(传统的标定方法);(2)张正友(介于传统和自标定之间)。1999
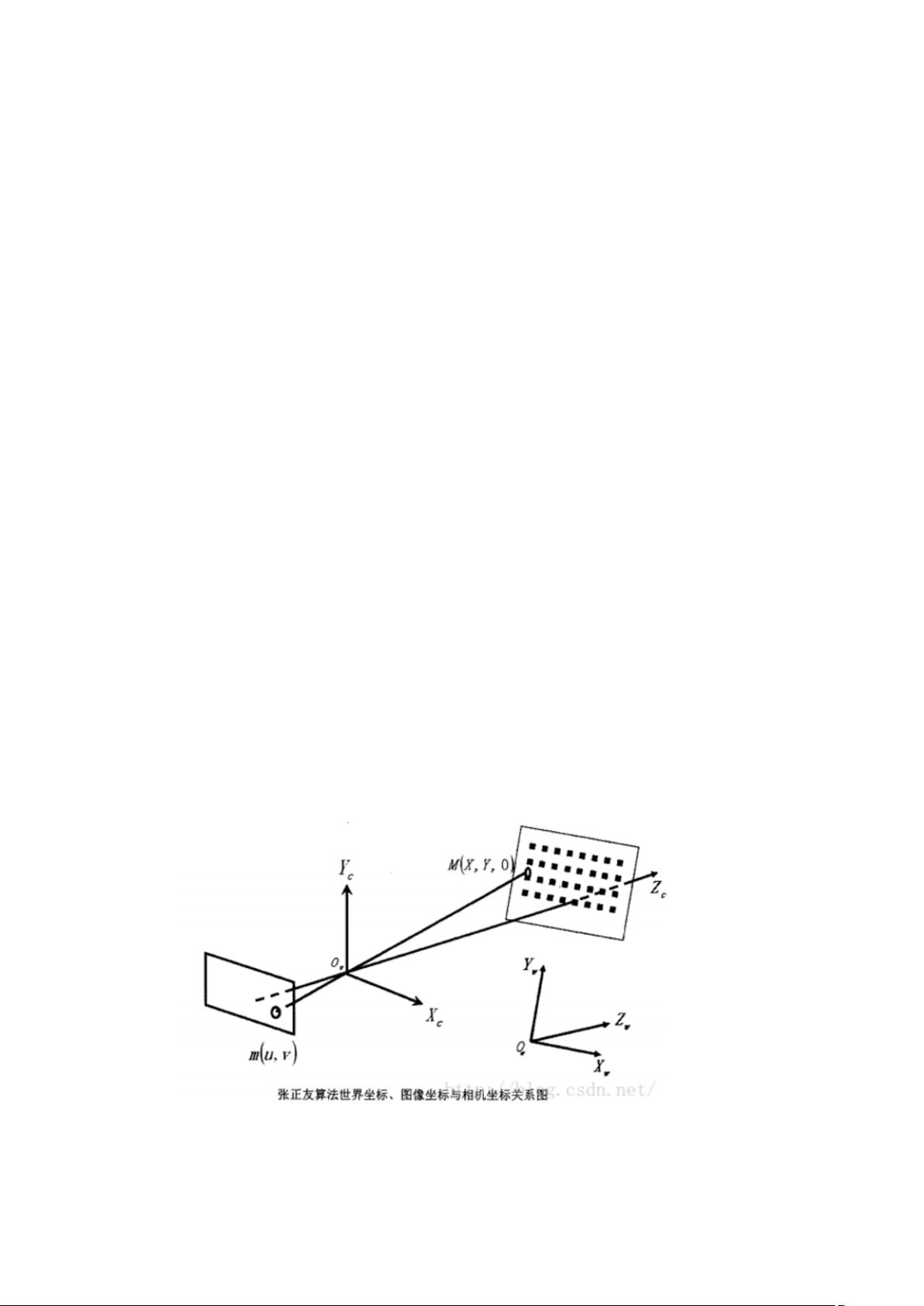
年,微软研究院的张正友提出了基于移动平面模板的相机标定方法。此方法是介
于传统标定方法和自标定方法之间的一种方法,传统标定方法虽然精度高设备有
较高的要求,其操作过程也比较繁琐,自标定方法的精度不高,张正友标定算法
克服了这两者的缺点同时又兼备二者的优点,因此对办公、家庭的场合使用的桌
面视觉系统(DVS)很适合。张正友标定方法由于简单、效果好而得到广泛使用。
张正友标定法的标定步骤:
1、打印一张模板并贴在一个平面上;
2、从不同角度拍摄若干张模板图像;
3、检测出图像中的特征点;
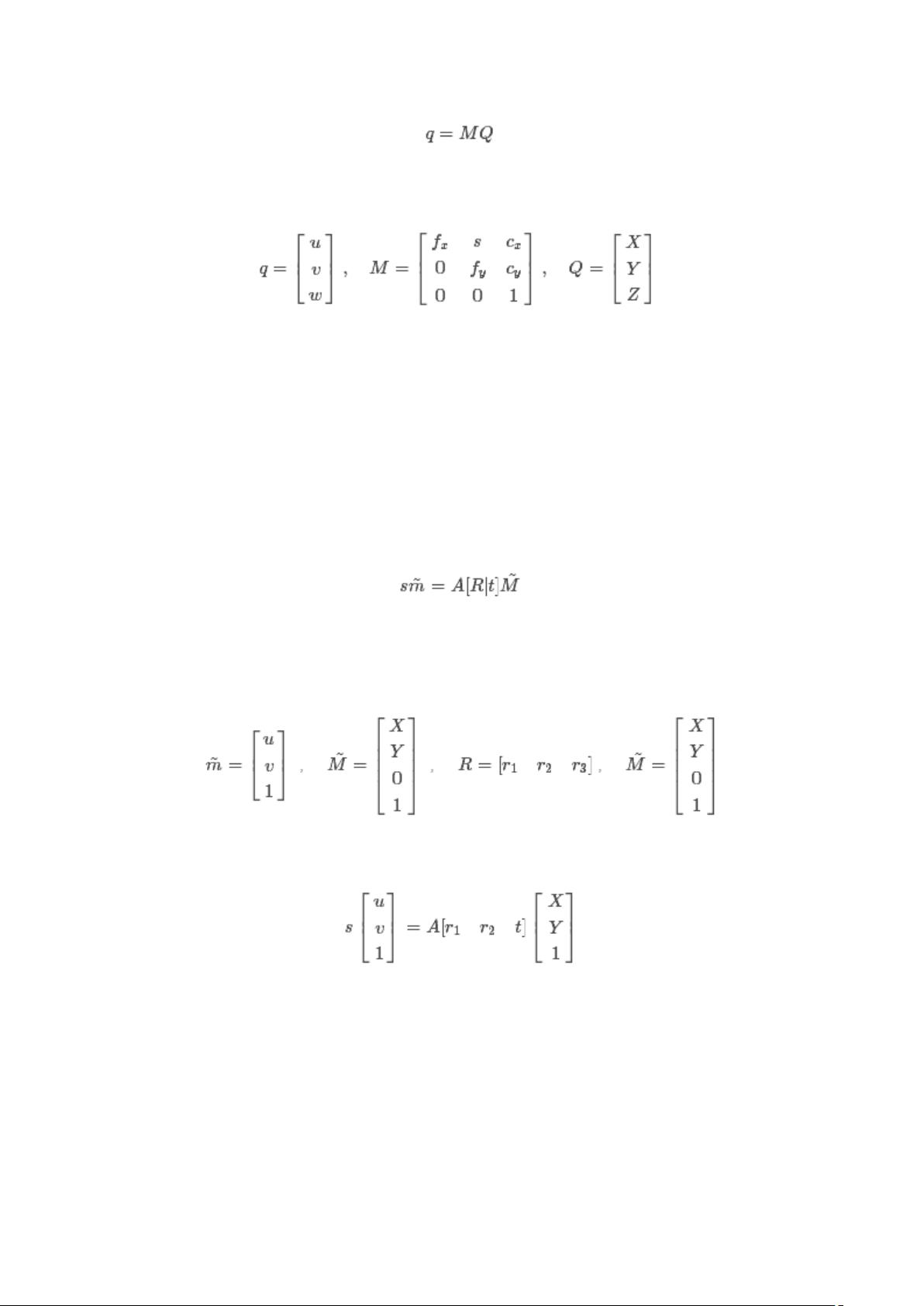
4、求出摄像机的外参数(单应性矩阵)和内参数(最大似然估计) ;
5、求出畸变系数;
6、优化求精。
张正友标定方法的主要思想是:
1、相机内参矩阵

剩余12页未读,继续阅读













- 1
- 2
- 3
- 4
前往页