数学建模国赛:无人机遂行编队飞行中的纯方位无源定位分析
需积分: 0 127 浏览量
2023-07-29
17:12:34
上传
评论 1
收藏 1.67MB PDF 举报


1
无人机遂行编队飞行中的纯方位无源定位分析
摘要
本文基于平面几何分析以及正弦定理建立了三角分区定位模型,针对发射与接收信号的
无人机的相对位置不同的问题,提出了分区控制算法,并结合三角形相似定理和控制变量的
思想,提出了互反馈方位调整模型。
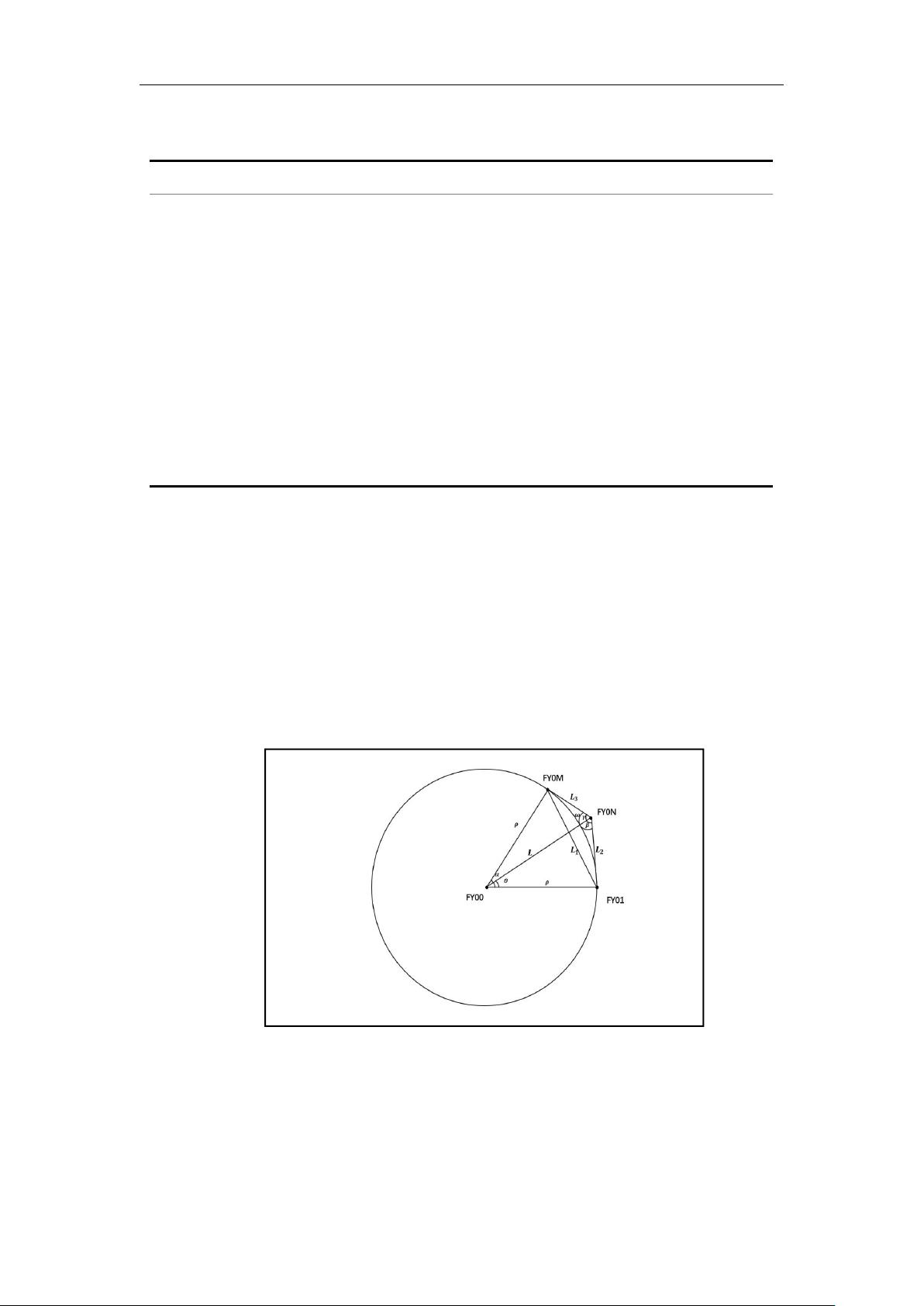
对于问题一的第一小问,利用三角分区定位模型、以及分区控制算法对接收信号的无人
机进行定位,该定位模型适用于所有包含 FY00 在内的任意三架无人机发射信号进行定位的
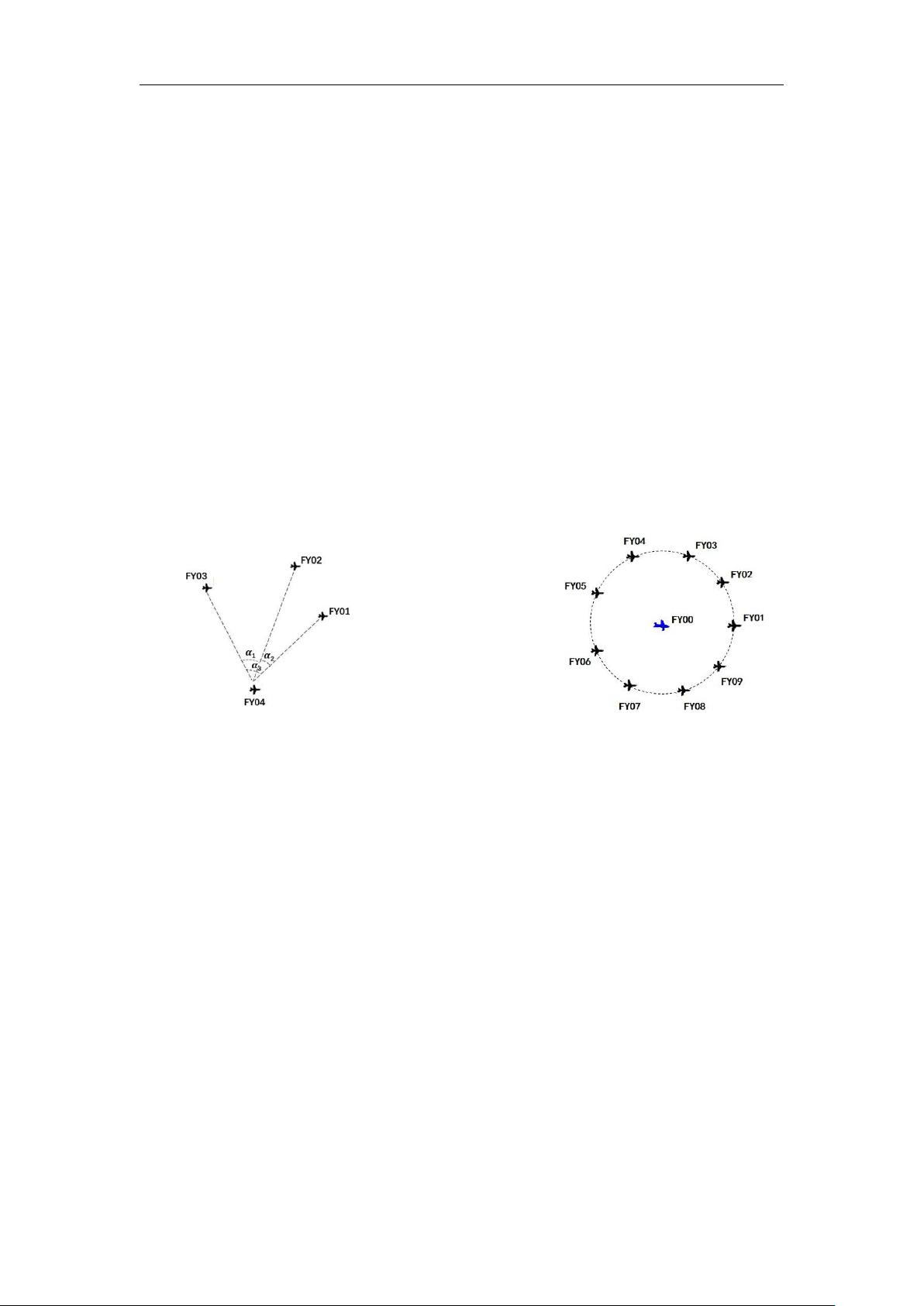
情况,即编号为 FY00、FY01、FY0M(M∈{2,3,4,5,6,7,8,9})的无人机发射信号,
当队列中某架飞机 FY0N 接收到的方向信息为
、
、
(
、
、
的定义见符号说明),根
据各个区间的的无人机之间的平面几何关系,可以得到各个区域的无人机的位置信息的关于
(
、
)的通解公式(见正文 5.1.2 公式(9)(10)(11)(12)),之后再利用分区控制
算法分别对各个区域对应的通解公式进行求解,即可得到队列中任意无人机的位置信息。
对于问题一的第二小问,由于 FY0M 的编号不再是已知的值,那么采用模型一定位时,
通解的表达式中就会多出一个未知量
,所以在模型一的基础上,利用平面几何关系,结合
正、余弦定理,利用变量代换法可分别得到第一、二、三、四区域上对应的关于,,
的四个新的方程,将这四个方程分别与第一问中的模型中的各个区域对应的方程组联立,那
么每个区域都可以得到三个关于,,的方程,三个方程求解三个未知数,显然是可以
求出被测点位的位置信息的。故除编号为 FY00、FY01 的无人机外,只需要再有一架未知
编号的无人机发射信号,便可对其他无人机进行有效定位。
对于问题一的第三问,结合三角形相似定理控制变量的思想,提出了互反馈调整模型,
让需要调整位置的无人机 FY0N 分两步进行自身位置的调整。规定调整位置时,除正在调整
的无人机外,其余所有无人机的相对位置不能改变。如 FY02 调整位置时,第一步沿直线
FY00FY02 移动,移动过程中同 FY00 一起不断向 FY01 发射信号,当 FY01 收到的方位信
息为 70°时停止移动;第二步让 FY01 同 FY00 一起向 FY02 发射信号,根据 FY02 收到的方
位信息与 70°的大小关系沿着直线 FY01FY02 移动,当收到的方位信息为 70°时,则该无人
机便到达了理想位置。用同样的方式,便可将其他无人机全部复位,(完整复位结果见正文
5.3)。
针对问题二,仔细观察可以发现,无人机无论以锥形队列还是问题一中的圆形队列飞行,
其相邻三架飞机的连线所形成的都是一个三角形,因此对于锥形队列无人机的位置调整仍可
以利用问题一中建立的互反馈方位调整模型,但再调整之前,应先保证领头的无人机与其后
面的某架无人机相隔 50m(即先固定好三角形的一条边),保证当互反馈调整模型返回的方位
信息为理想的角度时,这个三角形的大小也是正确的。利用该模型对无人机位置进行多次监
测调整,由于该题中的三角形是等边三角形,所以当相邻三架无人机收到来自另外两架无人
机的方向信息都是 60°时,那么该三架无人机位置就调整好了。其余无人机位置调整便只需
要重复前三架飞机的互反馈调节过程该过程即可。
关键字:三角分区定位模型;分区控制算法;变量控制;互反馈方位调整模
剩余16页未读,继续阅读
资源评论













