2022年全国大学生数学建模竞赛本科组B题(无人机纯方位无源定位的问题研究)
需积分: 5 169 浏览量
2023-06-21
14:17:37
上传
评论 35
收藏 2.63MB PDF 举报


1
无人机纯方位无源定位的问题研究
摘要
无人机遂行编队飞行中一般采用纯方位无源定位,本文主要通过建立被动接
收信号无人机定位模型和位置调整模型,使得无人机在接收到方位信息后能够迅
速从略有偏差的位置调整到理想位置,保持编队队形。
针对问题一的第一小问,题目中说的定位模型,我们将它理解为两种意思:
一是根据无人机接收到的方向信息确定其实际位置,二是定位无人机应当到达的
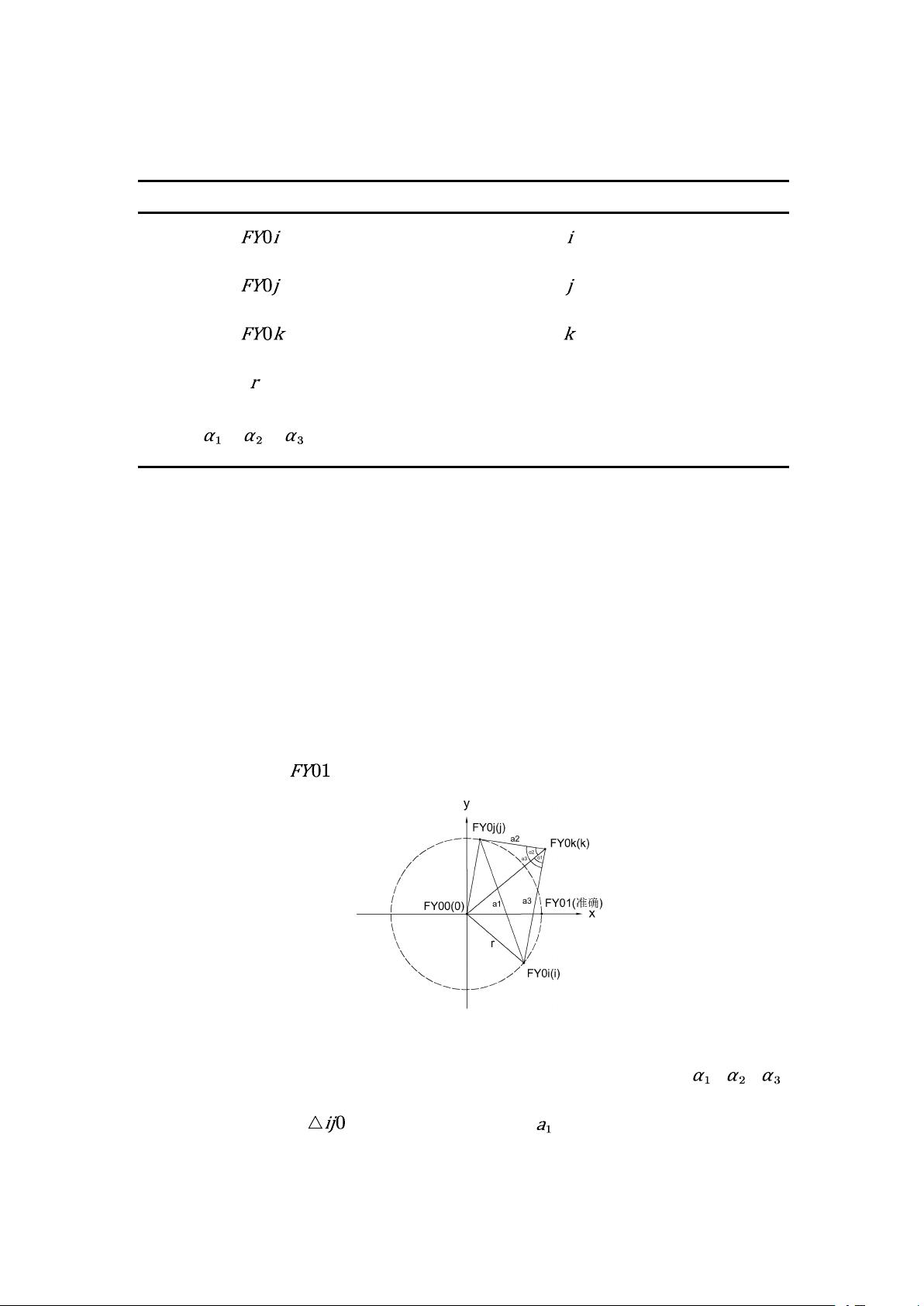
准确位置。对于定位实际位置,以三个方位信息和圆形编队的半径为已知条件,
建立二维直角坐标系,通过角与角之间的关系与余弦定理反解出被动接收信号无
人机的位置,即与准确位置略有偏差的实际位置;对于定位准确位置,同样建立
二维直角坐标系,一个动点到两定点的夹角是定值,那么此时该动点的运动轨迹
是由上下对称的两段圆弧合成的封闭曲线,由于有三架无人机的位置是确定且无
偏差的,所以被动接收信号无人机就会有三条运动轨迹,它们相交于一个点,该
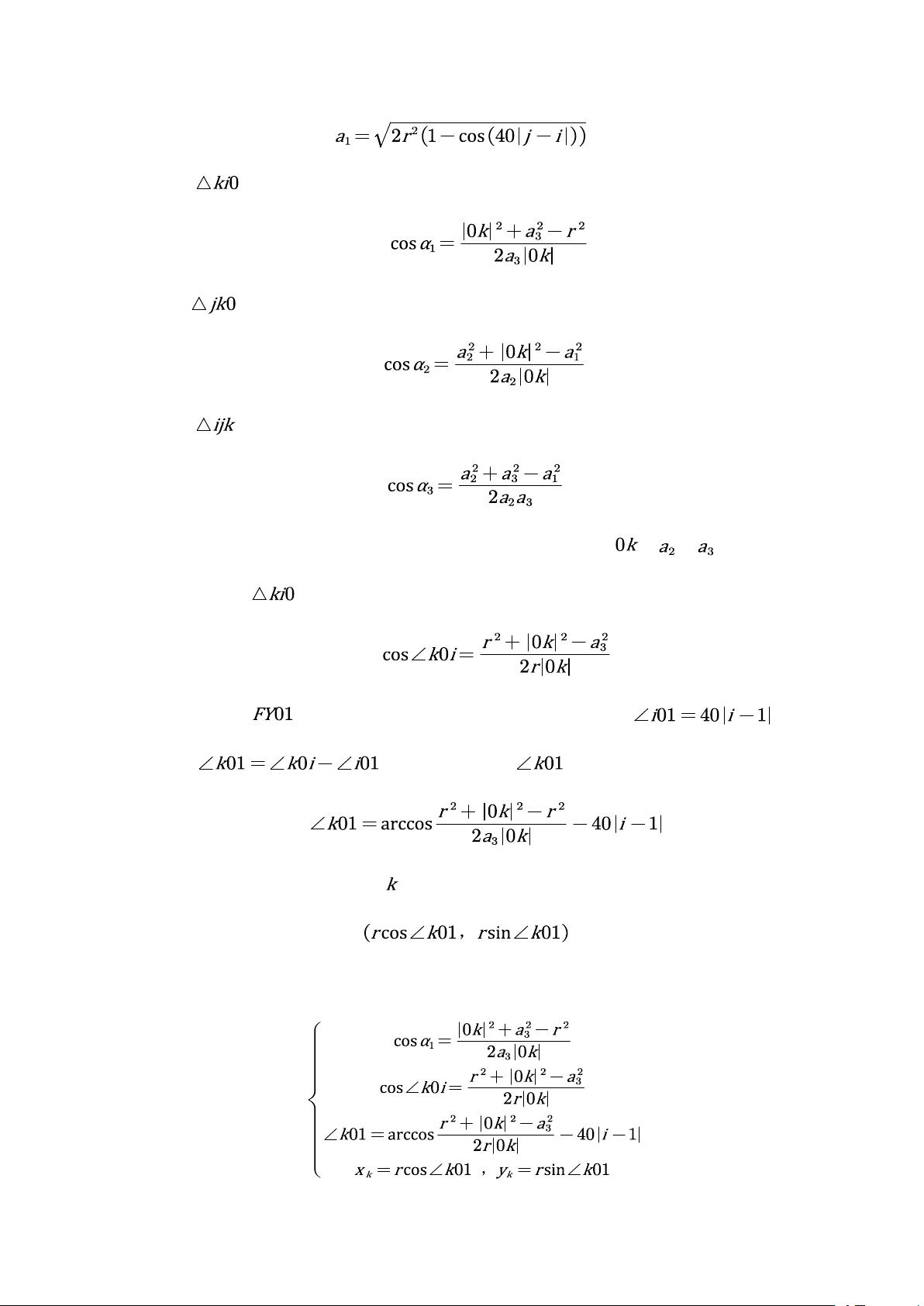
点就是接收信号无人机的准确位置,通过多次使用余弦定理,将三个方位信息用
已知的边和角表示,这样建立了被动接收信号无人机定位模型。
针对问题一的第二小问,确定
0
号和
1
号无人机发射信号,从剩下八架无人
机中选择一架看成一个动点被动接收信号,“若一个动点到两定点的夹角是定值,
那么此时该动点的运动轨迹是由上下对称的两段圆弧合成的封闭曲线”,我们对
前面这句话进行了证明:当定值夹角为钝角时,轨迹是个“眼睛”;当定值夹角
为锐角时,轨迹是个“葫芦”。由“三圆共点”可知,这些轨迹最终会有公共交
点,该点就是被动接受信号无人机略有偏差的实际位置,使用枚举法算出所有情
况下略有偏差的三个方向信息。对于某架接收信号无人机,遍历以上所有情况,
当三个方位信息的准确值与偏差值之差的平方和为最小值时,在表
2
中查找到除
0、1 号无人机外,还需要 1 架无人机发射信号,才能实现无人机的有效定位。
针对问题一的第三小问,由无人机初始位置可知,0 号和 1 号无人机已经处
于理想位置,在飞行过程中保持二者的相对位置关系。其他无人机需进行位置调
整,调整方向分成向北和向南两种,具体方案如下:设定步长为 0.01 米,向四
周全方位遍历,当与准确位置相差 0.01 米时,我们就近似地认为到达了理想位
置。
针对问题二,我们假设有两架无人机的位置无偏差,比如 1 号和 5 号,接下
来我们在问题一第三小问的基础上定位 2 号无人机,再向四周遍历到其准确位置,
当位于三架无人机构成的三角形的边的延长线上时,无法实现准确定位,因此第
二轮中 4、7、9、11、13、14 号无人机依然无法进行定位,在第三轮中选取 2、
6、8 为发射信号无人机,剩下未定位的无人机则都能进行定位及位置调整。
关键词:纯方位无源定位,二维直角坐标系,余弦定理,三圆共点

剩余26页未读,继续阅读
资源评论













