




已知一非线性系统
y(k)
y(k+1) u (k)
y (k)
= +
+
3
2
1
给定的的期望轨迹为
sin sin
d
k k
y (k)
p p
= +
2 2
25 10
试采用 RBF 神经网络进行自适应控制,其中 jacobian 信息由 RBF 网
络辨识,并进行 Matlab 仿真。
选用网络结构为 2-4-1 层的 RBF 网络,输入为:u(k),y(k),隐层神经元个数为 4。
网络的学习参数取 α=0.05,η=0.5。
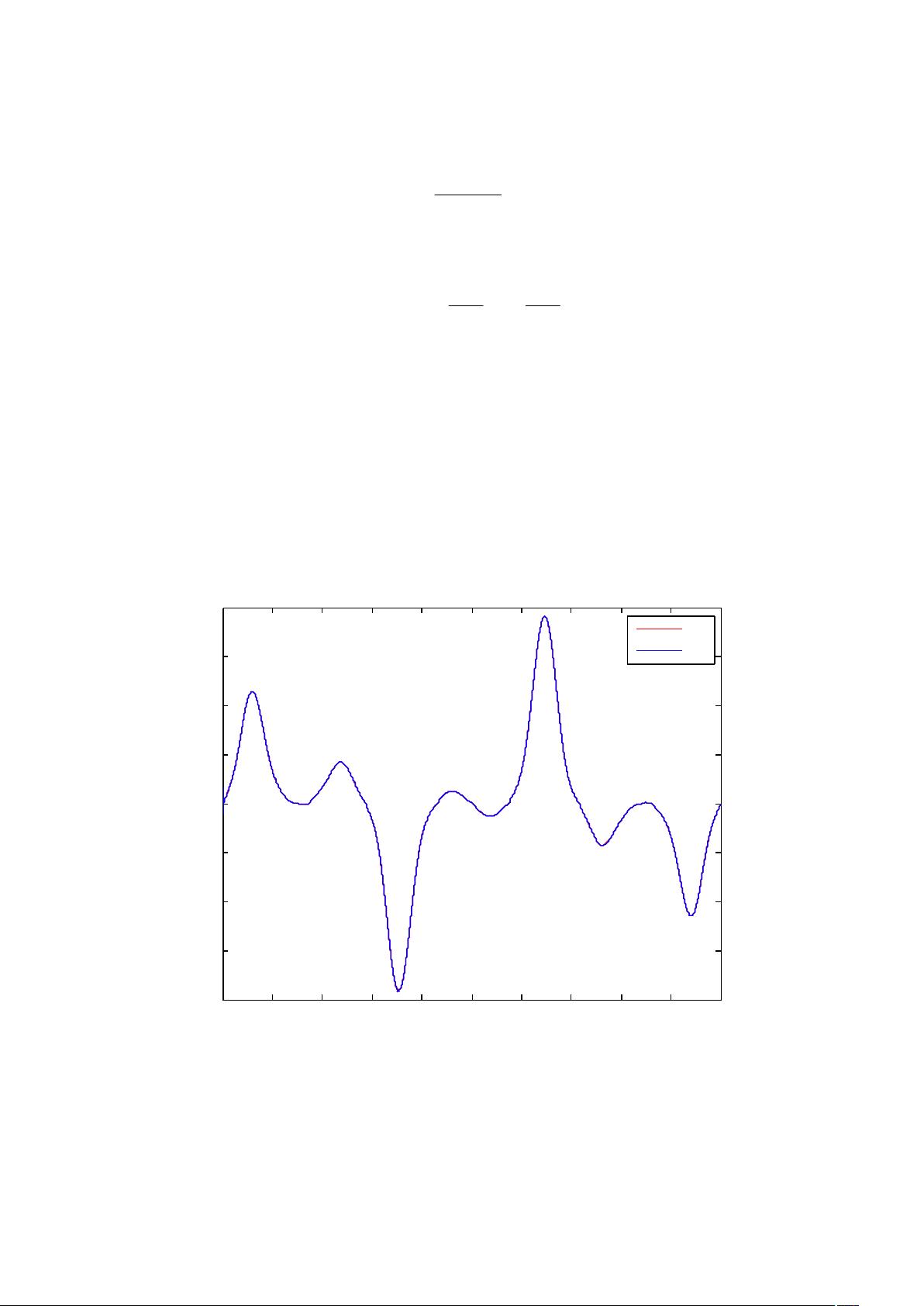
仿真结果见图 1、2、3.
图 1 参考模型辨识结果
0 5 10 15 20 25 30 35 40 45 50
-8
-6
-4
-2
0
2
4
6
8
time(s)
y and ym
y
ym













