You Only Look Twice: Rapid Multi-Scale Object Detection In
Satellite Imager y
Adam Van Een
CosmiQ Works, In-Q-Tel
avaneen@iqt.org
ABSTRACT
Detection of small objects in large swaths of imagery is one of
the primary problems in satellite imagery analytics. While object
detection in ground-based imagery has beneted from research
into new deep learning approaches, transitioning such technology
to overhead imagery is nontrivial. Among the challenges is the
sheer number of pixels and geographic extent per image: a single
DigitalGlobe satellite image encompasses
>
64 km
2
and over 250
million pixels. Another challenge is that objects of interest are
minuscule (oen only
∼
10 pixels in extent), which complicates
traditional computer vision techniques. To address these issues, we
propose a pipeline (You Only Look Twice, or YOLT) that evaluates
satellite images of arbitrary size at a rate of
≥
0
.
5
km
2
/
s. e
proposed approach can rapidly detect objects of vastly dierent
scales with relatively lile training data over multiple sensors. We
evaluate large test images at native resolution, and yield scores of
F
1
>
0
.
8 for vehicle localization. We further explore resolution and
object size requirements by systematically testing the pipeline at
decreasing resolution, and conclude that objects only
∼
5 pixels in
size can still be localized with high condence. Code is available at
hps://github.com/CosmiQ/yolt
KEYWORDS
Computer Vision, Satellite Imagery, Object Detection
1 INTRODUCTION
Computer vision techniques have made great strides in the past few
years since the introduction of convolutional neural networks [
5
]
in the ImageNet [
13
] competition. e availability of large, high-
quality labelled datasets such as ImageNet [
13
], PASCAL VOC [
2
]
and MS COCO [
6
] have helped spur a number of impressive ad-
vances in rapid object detection that run in near real-time; three of
the best are: Faster R-CNN [
12
], SSD [
7
], and YOLO [
10
] [
11
]. Faster
R-CNN typically ingests 1000
×
600 pixel images, whereas SSD uses
300
×
300 or 512
×
512 pixel input images, and YOLO runs on either
416
×
416 or 544
×
544 pixel inputs. While the performance of all
these frameworks is impressive, none can come remotely close to in-
gesting the
∼
16
,
000
×
16
,
000 input sizes typical of satellite imagery.
Of these three frameworks, YOLO has demonstrated the greatest
inference speed and highest score on the PASCAL VOC dataset. e
authors also showed that this framework is highly transferrable
to new domains by demonstrating superior performance to other
frameworks (i.e., SSD and Faster R-CNN) on the Picasso Dataset
[
3
] and the People-Art Dataset [
1
]. Due to the speed, accuracy,
and exibility of YOLO, we accordingly leverage this system as the
inspiration for our satellite imagery object detection framework.
e application of deep learning methods to traditional object
detection pipelines is non-trivial for a variety of reasons. e unique
aspects of satellite imagery necessitate algorithmic contributions to
address challenges related to the spatial extent of foreground target
objects, complete rotation invariance, and a large scale search space.
Excluding implementation details, algorithms must adjust for:
Small spatial extent
In satellite imagery objects of interest
are oen very small and densely clustered, rather than
the large and prominent subjects typical in ImageNet data.
In the satellite domain, resolution is typically dened as
the ground sample distance (GSD), which describes the
physical size of one image pixel. Commercially available
imagery varies from 30 cm GSD for the sharpest Digital-
Globe imagery, to 3
−
4 meter GSD for Planet imagery. is
means that for small objects such as cars each object will
be only
∼
15 pixels in extent even at the highest resolution.
Complete rotation invariance
Objects viewed from over-
head can have any orientation (e.g. ships can have any
heading between 0 and 360 degrees, whereas trees in Ima-
geNet data are reliably vertical).
Training example frequency
ere is a relative dearth of
training data (though eorts such as SpaceNet
1
are aempt-
ing to ameliorate this issue)
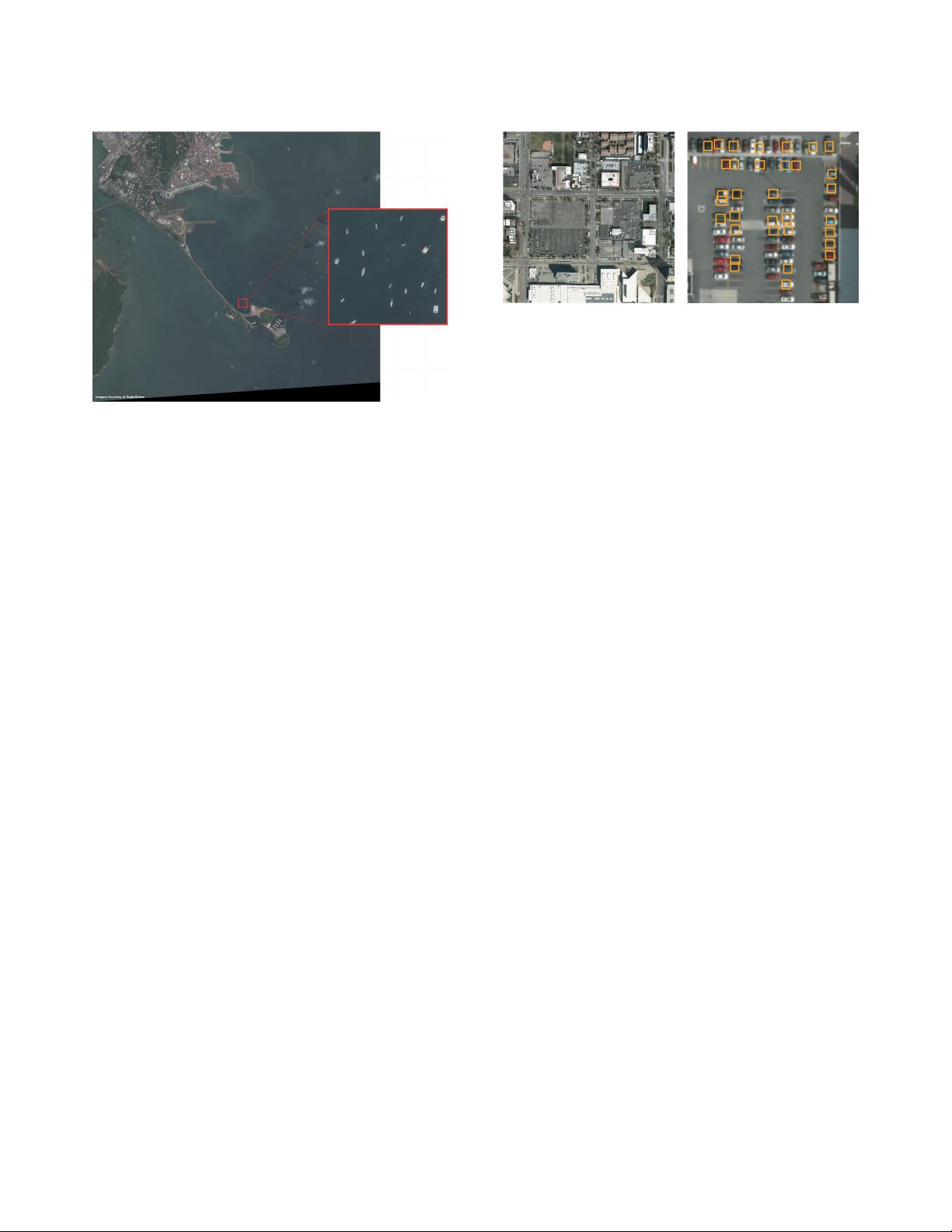
Ultra high resolution
Input images are enormous (oen
hundreds of megapixels), so simply downsampling to the
input size required by most algorithms (a few hundred
pixels) is not an option (see Figure 1).
e contribution in this work specically addresses each of these
issues separately, while leveraging the relatively constant distance
from sensor to object, which is well known and is typically
∼
400
km. is coupled with the nadir facing sensor results in consistent
pixel size of objects.
Section 2 details in further depth the challenges faced by standard
algorithms when applied to satellite imagery. e remainder of
this work is broken up to describe the proposed contributions as
follows. To address small, dense clusters, Section 3.1 describes
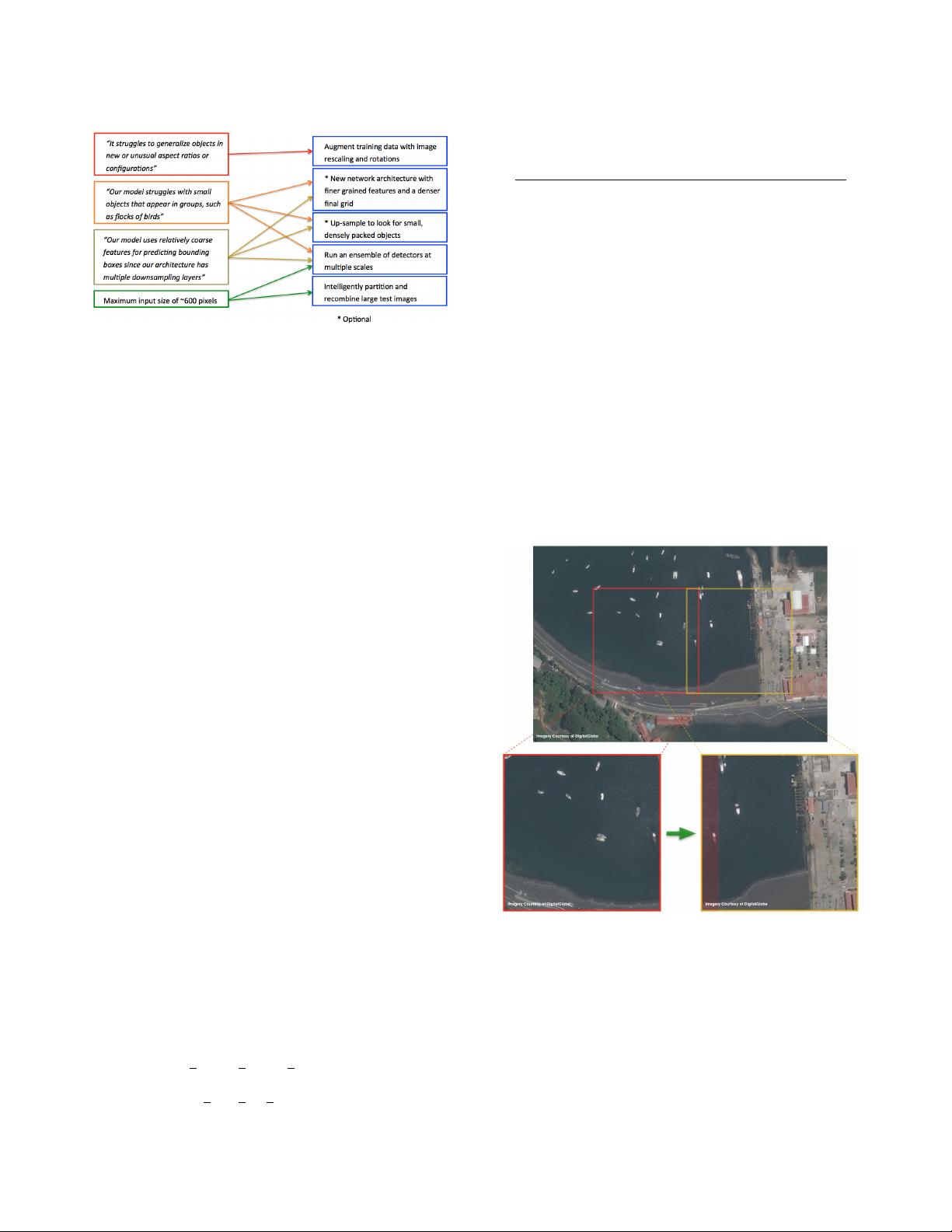
a new, ner-grained network architecture. Sections 3.2 and 3.3
detail our method for spliing, evaluating, and recombining large
test images of arbitrary size at native resolution. With regard to
rotation invariance and small labelled training dataset sizes, Section
4 describes data augmentation and size requirements. Finally, the
performance of the algorithm is discussed in detail in Section 6.
1
hps://aws.amazon.com/public-datasets/spacenet/
arXiv:1805.09512v1 [cs.CV] 24 May 2018