
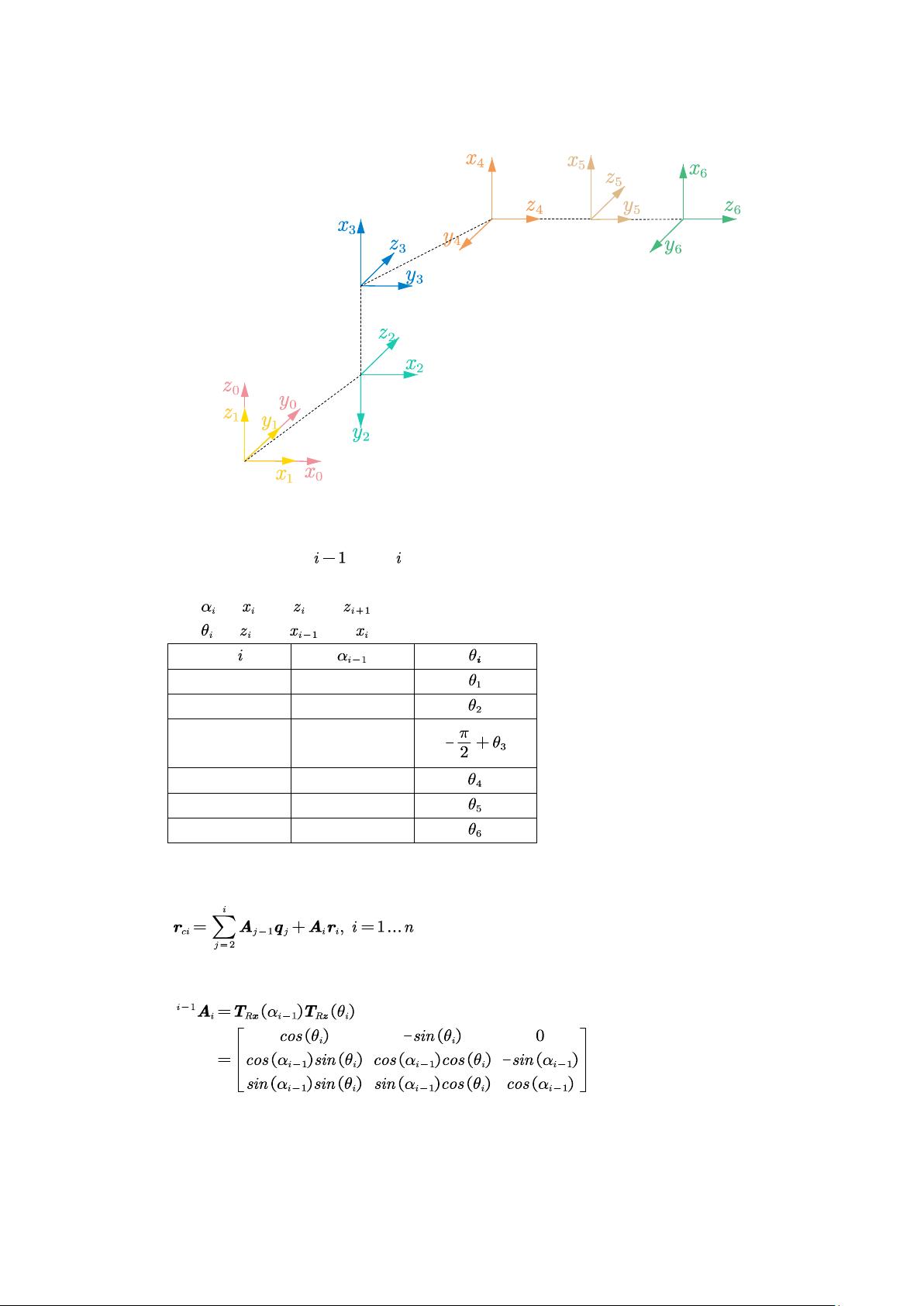
1. 坐标关系
2. DH 参数,描述了如何从 坐标系到 坐标系
DH 参数定义:
:绕 轴,从 旋转到 的角度;
:沿着 ,从 移动到 的距离;
:沿着 ,从 移动到 的距离;
:绕 轴,从 旋转到 的角度。
关节
1
0
0
0
2
-90
0
0.125
3
0
0.5
0
4
-90
0
0.25
5
90
0
0.125
6
-90
0
0.125
3. 齐次变换矩阵
使用 Matlab 验证后,该齐次变换矩阵正确
 机械臂凯恩方法建模+控制算法源码(毕设).zip (81个子文件)
机械臂凯恩方法建模+控制算法源码(毕设).zip (81个子文件)  code_20105 GraduationProject
code_20105 GraduationProject  HighOrderTerminalSMC.m 15KB CR1405 小臂组件-wf_默认_sldprt.STEP 5.96MB myControlGUI.vi 12KB TestInfiniteTimeSMC.m 2KB myTrajectory.m 3KB ControlFeature.m 5KB CRP14_10.bin 80.87MB TestController.m 1KB ControlTestPlant.m 1KB TrajectoryCubicPolynomial.m 6KB myCRP14_Trajectory.slx 29KB TrajectoryHighOrderTerminalSMC.m 20KB myCRP14_V1.slx 30KB SMC_Fuzzy.fis 625B SevenTrajectory.m 5KB ParaInitial.m 481B CRP09CanePlant.m 14KB CR1403 大臂组件-wf_默认_sldprt.STEP 4.94MB CRP14_10V2.0.bin 41.18MB TrajectoryInfiniteTimeSMC.m 14KB CRP14_10V2.0.biq 41.18MB TestExponentialApproachLawSMC.m 1KB CRP14CaneTorqueTest.m 11KB GlobalFastTerminalSMC.m 14KB GUILineTrajectorMake.m 2KB LineTrajectoryControl.m 10KB TwoPointPosition.m 183B myCRP14_FuzzySMC.slx 32KB AlgorithmTestModel.slx 21KB
HighOrderTerminalSMC.m 15KB CR1405 小臂组件-wf_默认_sldprt.STEP 5.96MB myControlGUI.vi 12KB TestInfiniteTimeSMC.m 2KB myTrajectory.m 3KB ControlFeature.m 5KB CRP14_10.bin 80.87MB TestController.m 1KB ControlTestPlant.m 1KB TrajectoryCubicPolynomial.m 6KB myCRP14_Trajectory.slx 29KB TrajectoryHighOrderTerminalSMC.m 20KB myCRP14_V1.slx 30KB SMC_Fuzzy.fis 625B SevenTrajectory.m 5KB ParaInitial.m 481B CRP09CanePlant.m 14KB CR1403 大臂组件-wf_默认_sldprt.STEP 4.94MB CRP14_10V2.0.bin 41.18MB TrajectoryInfiniteTimeSMC.m 14KB CRP14_10V2.0.biq 41.18MB TestExponentialApproachLawSMC.m 1KB CRP14CaneTorqueTest.m 11KB GlobalFastTerminalSMC.m 14KB GUILineTrajectorMake.m 2KB LineTrajectoryControl.m 10KB TwoPointPosition.m 183B myCRP14_FuzzySMC.slx 32KB AlgorithmTestModel.slx 21KB CRP14机械臂建模 .docx 221KB myCRP14_V2.slx 28KB TrajectoryDataTest.m 3KB TrajectoryMakeControl.m 5KB ExponentialApproachLawSMC.m 14KB CR1806 腕部组件_默认_sldprt.STEP 3.51MB HighOrderTerminalSMCModel.slx 29KB myJacob.m 2KB myTrajectory2.m 3KB CRP14ForwardKinematic.m 1KB ControlTestModel.slx 17KB myCRP14_Kinematics.slx 25KB TestHighOrderTerminalSMC.m 2KB myCRP14_V1.xml 15KB myCRP14_V1_DataFile.m 10KB model.slx 21KB ControlGUI.fig 83KB myCRP14_Disturb.slx 28KB CRP14TrajectoryMake.m 1KB CR1401 底座组件3-wf_默认_sldprt.STEP 969KB CR1402 腰部组件-wf_默认_sldprt.STEP 2.69MB MyTestRobot.slx 20KB TrajectoryQuinticPolynomial.m 7KB RubustImprovedApproachLawSMC.m 14KB CR1404 肘部组件-wf_默认_sldprt.STEP 5.9MB myIKSolver.m 2KB GUITrajControl.m 2KB ControlFigure.m 658B ImprovedApproachLawSMC.m 14KB FuzzyApproachLawSMC.m 14KB Puma560Dynamic TorqueTest.slxc 5KB Puma560CaneModel.m 15KB SimTest.slx 64KB slprj sim varcache sm_welding_robot checksumOfCache.mat 392B varInfo.mat 2KB tmwinternal simulink_cache.xml 307B TorqueTest checksumOfCache.mat 392B varInfo.mat 664B tmwinternal simulink_cache.xml 307B ControllerTestModel.slx 22KB TorqueTest.slx 25KB sm_welding_robot.slxc 5KB myPUMA560.slx 31KB ControllerTestModel.slx.autosave 16KB TransMatrix.m 594B 仿真用的机械臂建模.docx 329KB ImprovedApproachLawSMC.m 14KB myCRP14_Terminal.slx 28KB ControlGUI.m 19KB JacobianCross.m 2KB TwoPointDistance.m 210B LineHighOrderTerminalSMC.m 20KB
CRP14机械臂建模 .docx 221KB myCRP14_V2.slx 28KB TrajectoryDataTest.m 3KB TrajectoryMakeControl.m 5KB ExponentialApproachLawSMC.m 14KB CR1806 腕部组件_默认_sldprt.STEP 3.51MB HighOrderTerminalSMCModel.slx 29KB myJacob.m 2KB myTrajectory2.m 3KB CRP14ForwardKinematic.m 1KB ControlTestModel.slx 17KB myCRP14_Kinematics.slx 25KB TestHighOrderTerminalSMC.m 2KB myCRP14_V1.xml 15KB myCRP14_V1_DataFile.m 10KB model.slx 21KB ControlGUI.fig 83KB myCRP14_Disturb.slx 28KB CRP14TrajectoryMake.m 1KB CR1401 底座组件3-wf_默认_sldprt.STEP 969KB CR1402 腰部组件-wf_默认_sldprt.STEP 2.69MB MyTestRobot.slx 20KB TrajectoryQuinticPolynomial.m 7KB RubustImprovedApproachLawSMC.m 14KB CR1404 肘部组件-wf_默认_sldprt.STEP 5.9MB myIKSolver.m 2KB GUITrajControl.m 2KB ControlFigure.m 658B ImprovedApproachLawSMC.m 14KB FuzzyApproachLawSMC.m 14KB Puma560Dynamic TorqueTest.slxc 5KB Puma560CaneModel.m 15KB SimTest.slx 64KB slprj sim varcache sm_welding_robot checksumOfCache.mat 392B varInfo.mat 2KB tmwinternal simulink_cache.xml 307B TorqueTest checksumOfCache.mat 392B varInfo.mat 664B tmwinternal simulink_cache.xml 307B ControllerTestModel.slx 22KB TorqueTest.slx 25KB sm_welding_robot.slxc 5KB myPUMA560.slx 31KB ControllerTestModel.slx.autosave 16KB TransMatrix.m 594B 仿真用的机械臂建模.docx 329KB ImprovedApproachLawSMC.m 14KB myCRP14_Terminal.slx 28KB ControlGUI.m 19KB JacobianCross.m 2KB TwoPointDistance.m 210B LineHighOrderTerminalSMC.m 20KB












