
一、操作系统探索总结(一)ROS 简介
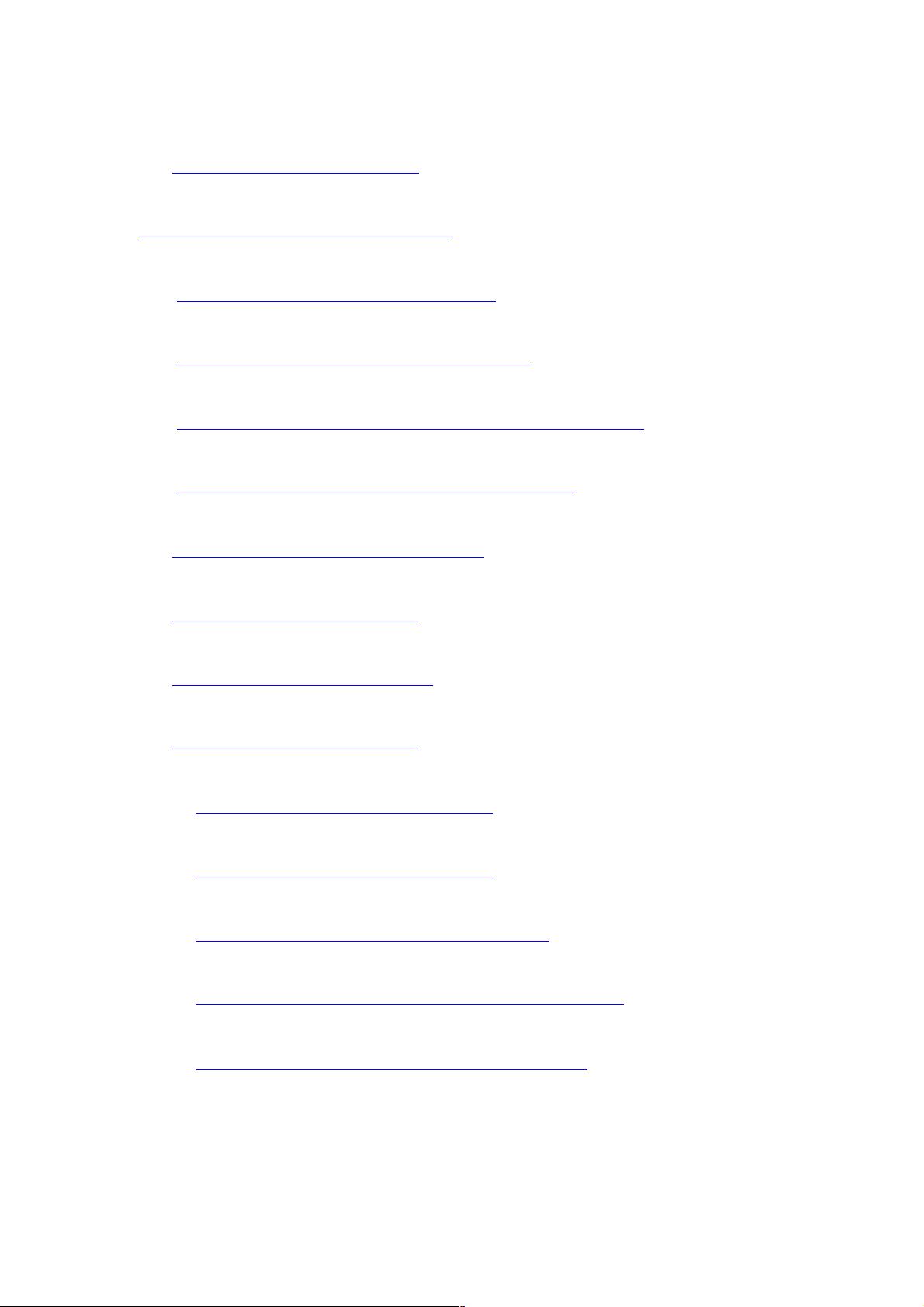
二、操作系统探索总结(二)ROS 总体框架
三、操作系统探索总结(三)ROS 新手教程
四、操作系统探索总结(四)简单的机器人仿真
五、操作系统探索总结(五)创建简单的机器人模型 smartcar
六、操作系统探索总结(六)使用 smartcar 进行仿真
七、操作系统探索总结(七)smartcar 源码上传
八、操作系统探索总结(八)键盘控制
九、操作系统探索总结(九)操作杆控制
十、操作系统探索总结(十)语音控制
十一、操作系统探索总结(十一)机器视觉
十二、操作系统探索总结(十二)坐标系统
十三、操作系统探索总结(十三)导航与定位框架
十四、操作系统探索总结(十四)move_base(路径规划)
十五、操作系统探索总结(十五)amcl(导航与定位)



剩余122页未读,继续阅读
资源评论


asdwwe2004
- 粉丝: 2
- 资源: 7









最新资源
- 基于ssm的烯烃厂压力管道管理平台源码(java毕业设计完整源码+LW).zip
- 基于出行链的电动汽车空间负荷预测,MATLAB,有注释,方便初学者理解上手,此程序用来计算节点处电动汽车充电负荷,不是商业区,住宅区等注意区分 有参考文献
- 基于ssm的校园二手交易系统源码(java毕业设计完整源码).zip
- 不同颜色机器人检测51-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- Flutter待办事务
- 汇川H3U的一个比较完整的程序框架,已经用于实际的工程中 汇川的PLC还是性价比挺高,特别是对于伺服的总线 汇川主打的伺服控制是CANLINK总线 这个例子有4个总 线伺服轴,用的是轴控指令,还
- 基于ssm的新冠疫情下的校园出入系统源码(java毕业设计完整源码+LW).zip
- 123是的第三方地方的双方各
- 自用.jar123123123123132
- S7-1200 S7-1500 SCL 小实例-定时器灵活应用.mp4
- ip地址转换的介绍说明
- 基于ssm的学生信息管理系统源码(java毕业设计完整源码+LW).zip
- 一拖三恒压供水全套图纸程序 威纶通触摸屏 西门子s7-
- 基于ssm的医院门诊挂号系统源码(java毕业设计完整源码+LW).zip
- 基于Cascade算法的尺度函数与小波函数求解实例演示-附Matlab源程序.zip
- linux下gtags工具
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


