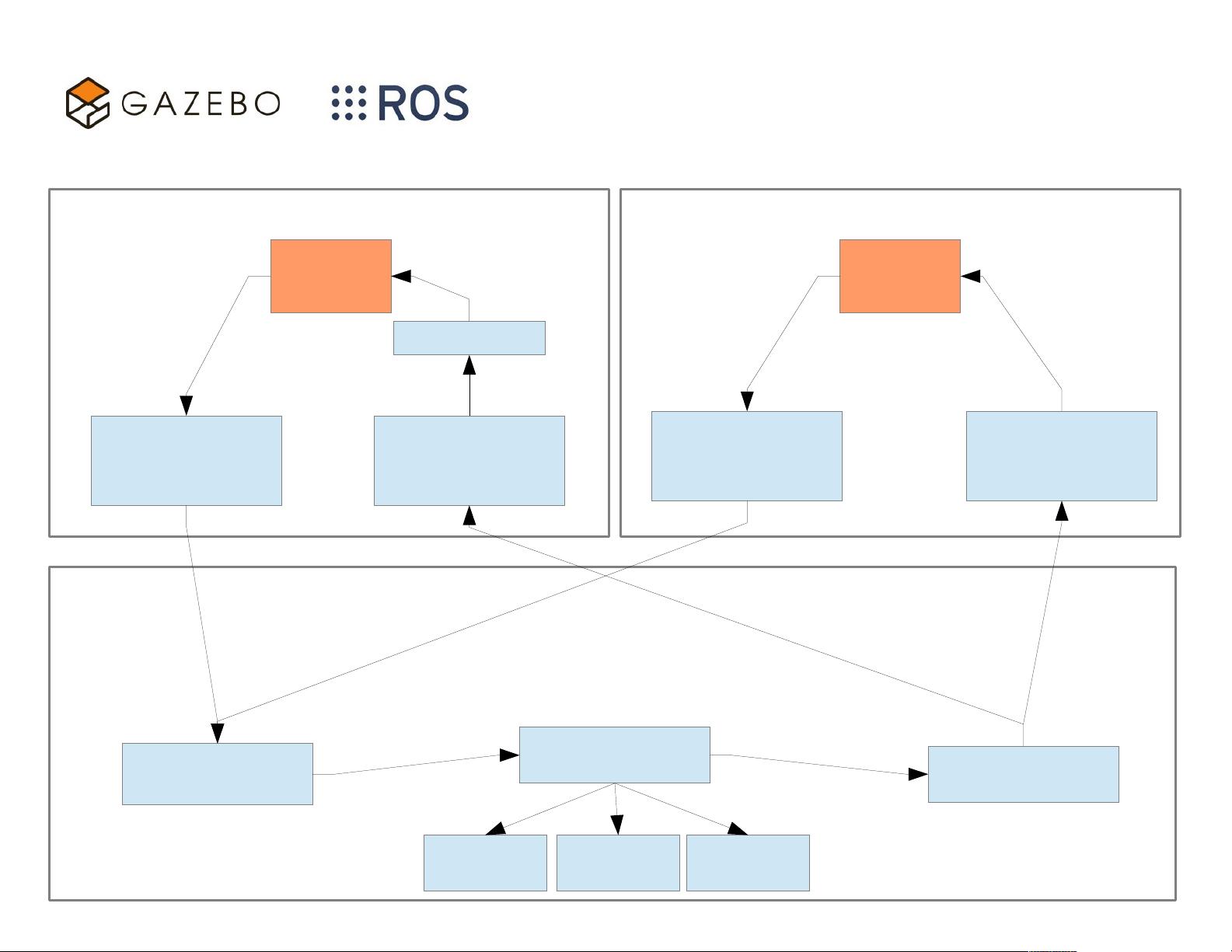
Effect of publishing Inverted Parent Child Relationship on TF tree
a) Example Tree b) C-B Inverted Case1 (Part of the time) c) C-B Inverted Case2 (part of the time)
A
B
AA
C
BB
D
A
B
AA
BB
C
D A
B
AABB
C
D

 机器人 ros1 noetic debian (12331个子文件)
机器人 ros1 noetic debian (12331个子文件)  00899f5109aecc06bd170b35244fe352768f4a 320B 00a6161c47a7eec16cab1e4cfb72a989040b9d 185B 01213c563cc7275877b5aeb103037462e78e24 304B 015d9bdbabd6449ac7398852ae38de36b5963a 345B 01cf8678ce391c6b5d2db0f47ba1bd0fee839a 162B 0445c019f978fb056de751237dc07c681e0bd6 126B 0555742df64f0db28d5dffaa58bf7bfa4d9565 196B 0589b0d8ef14ad310bcfbaf198ad5ea0247050 118B 06613e7133b0b29b813496cbdb699e6dc7129e 163B 06e825fd2ea52b97eb133c1ce267a6887944c4 164B 074796be2973f85c994e747e187bcfff7f88cc 330B 07833ca049ba7b20090846bff762aa80e1ce46 354B 082db3e92a2f4725c51a5f74bd966f4cdbf60a 128B 091073a03aa2fa81f36be7aced983676201592 94B 09970b16bdf76e8aebfcd9e9862280b509002c 581B 09bdb23cf3f6a7f048a130534dd35ebdb90313 186B 0a0963ac86187dddf5e433dae35ace91e32167 457B 0aa72d0393b5ac99567fa481066a49487b33ae 94B 0abbd20d8adbcedf1bdd54666058338acd27ae 354B 0b3f90eae10a8907c87a987169a4938b057c97 191B 0c8acbbb91d2d88a38dc21f3f32e6d39ff8bdf 94B 0d09f801fdfe74cbf48f103a3faa3fa0707eb1 251B 0eb08bbe10558069894bca0cda537614d1ba8b 94B 1084deb47a26b2114d5ef2454e3d9353530f75 292B 10e343b530bb0991c3d6b59736df746d7373c0 263B 1185cb1231bc9633fda01016cf020df47d2cc5 2KB 1206dcc451f1e7d9921b0cb19b72626e391c93 255B 123850bc3ce8fe327661dfa01d12df4818335e 183B 12458ed3daccfdc140542414a56f95a4e56cef 228B 150bfeaa184e472e9fea15ceb30315c4b753e8 164B 15b8aa65e382c22d6ef33c9fdca1af55c17c67 205B 173c9c96d617549799d93f7276c101468f026c 156B 18ec3618dac833b3b8f3d74251820d5bdb4dff 160B 19f544b6a8b8d8ea4c5f7773745bc2f6d190b1 358B 1c9902d5146c17425aeaf2b7f61a57f456b04f 200B 1e2158575af50715f5f47958d9ca0e9b300b85 115B 1e4d34eca753ac0523fc48ba3dbd0edc0c95f7 139B 1f8ef5ce8b446b1fd50b49fcebf2a11cb738b9 2KB 21fedb33eb3c643059a852203411e1a15c062d 204B 2240ee4e1ee804fe4000d3271fc55c2e46691d 94B 2320b6c48623cae279f0c5d737671c53c6ebe2 186B 2540a8cea214c1ef4825ec31612a148352c738 348B 2715e9c1b8e400124eb21e787b1f8d889b1ac1 279B 27f0489f2c6b3b2829b2f2263936c37f19ab7d 188B 2802fca92bf1117ab81a92bc82e520816b33ff 106B 28144c23dcf1a8be3c3bc9c9e53e2b14bb8645 722B 285c8a374b4d9932852d29f04d6edc83a7f38e 157B 294d6a9efcaea2dd2cb155f2962c57a551a3ed 161B 2a30e6adb82a6b1d02a1a5bf8ab5a1be3f734a 161B 2a34c60550ae93fcad5e146f7f880c8ec3c2f9 185B 2a3e15a1bb1e2913c7eb228e3cfa743646ccce 90B 2ad615c1c08f6c53609eea8ef3f79b09039c54 213B 2aff32b3038f68e0eb21ba0a6878491437339f 158B 2cd67e1cd67aca8ea3e9e5b8aced567d8e61a6 94B 30d39ba9bb1164fd03a8d33535ee4bd68a2409 192B 30f3941f8dd718599a2131fbbf7c31e122217d 283B 315ba734e7981f7418dca6189eceebf6724819 617B 3192ce485c9b3ccd1c2a2c6eb425522960dfca 157B 327af855899de0af8c672ddfd0b11632a9027b 331B 3307f9195e6c5482229d5859b53b2c953171ce 167B 34cb53894032d4b11d3e0890737f0c9e361991 580B 353ae4beca8a3821fbf826eed17129d660d83a 2KB 37b85d13a82a6e2ea3bf30d6392e6769f7f0d9 156B 37c2f051de5e64a65173455494cc973de5e98a 595B 382785d458b51edaa4b0830945b983e0fc88e5 299B 38a3306bc52744c732564290724943107818cb 94B 39860a6b61567fd53aa8ecf4ea04b60c8c7e88 82KB 3c55ed270a34e581a55400d67e31ae850fa24b 177B 3d2093e832e5ee65c2fe08fcb8398e98c23857 303B 3d73e52c6e8a99fb1072fd5a97b09b79141d86 191B 3e243d3470345bfac88c5c3bd40b98228a6355 255B 3f14c7a475e6ae5079387aca6dcce96bda0085 167B 3fd4dd739055bbafea22d2acea2df20b8004e2 238B 4090bfdc231e3eebbbc35b284e20580d329b81 73B 40cdf52b26a2e9930d1ee775bb75119175690f 186B 41482133c42877f0d784618cd006806667e3a6 114B 43536ddea4234b76cdbb6152151ffd4a7502ad 143B 444fa14eadfd5860b7643fdcd82fdff9d73f81 457B 45d7cfa3738dbf1ae93be1894aded85fecfee0 115B 4654c4e824f2828696cf10b54610d3ab129a44 119B 46cc084922a4a6f60bba0ae374c043c5960cc8 148B 46f823b10ac95d02d3757afbb61719a90dddf5 154B 474f54456a3b504414816fcfa4cb980da48536 833B 483845ece15b542f4b645210e8a1bef3ff6690 917B 48834bbefa77e00fb91731debe371603363bc8 206B 49dcd3cf5b666bb1ad305920c15051877ed441 182B 49ee9cb0d9d98db8b50b001f444c443a74e9ac 347B 4a446fd95688bc809bbbcaf6cc2514ec30308a 131B 4a6d042334ecc1cdbdd2f695aae37b6c1a8194 51B 4c2252e511a268c4fe0b6299c77673e749f330 2KB 4c42b16e33dea81b40f9ada00a45ccf96ea241 118B 4d93e4d29706694d892bbd0503cb08698ed295 833B 4de5102b0557f62f0a7496dd27f1a61b034928 94B 4e5699112029598f316776967dc41970150640 124B 0.5-devel 181B 0.5-devel 41B 5025da415006f7ae9169e85282a333d5fd492e 164B 503b53113b8167b97739b5b56de233a2647d02 147B 51496db7de8567e520e2f169b25d6053bad259 304B 5152a042b614a7e7a41087904b91d686f1e1a2 441B
00899f5109aecc06bd170b35244fe352768f4a 320B 00a6161c47a7eec16cab1e4cfb72a989040b9d 185B 01213c563cc7275877b5aeb103037462e78e24 304B 015d9bdbabd6449ac7398852ae38de36b5963a 345B 01cf8678ce391c6b5d2db0f47ba1bd0fee839a 162B 0445c019f978fb056de751237dc07c681e0bd6 126B 0555742df64f0db28d5dffaa58bf7bfa4d9565 196B 0589b0d8ef14ad310bcfbaf198ad5ea0247050 118B 06613e7133b0b29b813496cbdb699e6dc7129e 163B 06e825fd2ea52b97eb133c1ce267a6887944c4 164B 074796be2973f85c994e747e187bcfff7f88cc 330B 07833ca049ba7b20090846bff762aa80e1ce46 354B 082db3e92a2f4725c51a5f74bd966f4cdbf60a 128B 091073a03aa2fa81f36be7aced983676201592 94B 09970b16bdf76e8aebfcd9e9862280b509002c 581B 09bdb23cf3f6a7f048a130534dd35ebdb90313 186B 0a0963ac86187dddf5e433dae35ace91e32167 457B 0aa72d0393b5ac99567fa481066a49487b33ae 94B 0abbd20d8adbcedf1bdd54666058338acd27ae 354B 0b3f90eae10a8907c87a987169a4938b057c97 191B 0c8acbbb91d2d88a38dc21f3f32e6d39ff8bdf 94B 0d09f801fdfe74cbf48f103a3faa3fa0707eb1 251B 0eb08bbe10558069894bca0cda537614d1ba8b 94B 1084deb47a26b2114d5ef2454e3d9353530f75 292B 10e343b530bb0991c3d6b59736df746d7373c0 263B 1185cb1231bc9633fda01016cf020df47d2cc5 2KB 1206dcc451f1e7d9921b0cb19b72626e391c93 255B 123850bc3ce8fe327661dfa01d12df4818335e 183B 12458ed3daccfdc140542414a56f95a4e56cef 228B 150bfeaa184e472e9fea15ceb30315c4b753e8 164B 15b8aa65e382c22d6ef33c9fdca1af55c17c67 205B 173c9c96d617549799d93f7276c101468f026c 156B 18ec3618dac833b3b8f3d74251820d5bdb4dff 160B 19f544b6a8b8d8ea4c5f7773745bc2f6d190b1 358B 1c9902d5146c17425aeaf2b7f61a57f456b04f 200B 1e2158575af50715f5f47958d9ca0e9b300b85 115B 1e4d34eca753ac0523fc48ba3dbd0edc0c95f7 139B 1f8ef5ce8b446b1fd50b49fcebf2a11cb738b9 2KB 21fedb33eb3c643059a852203411e1a15c062d 204B 2240ee4e1ee804fe4000d3271fc55c2e46691d 94B 2320b6c48623cae279f0c5d737671c53c6ebe2 186B 2540a8cea214c1ef4825ec31612a148352c738 348B 2715e9c1b8e400124eb21e787b1f8d889b1ac1 279B 27f0489f2c6b3b2829b2f2263936c37f19ab7d 188B 2802fca92bf1117ab81a92bc82e520816b33ff 106B 28144c23dcf1a8be3c3bc9c9e53e2b14bb8645 722B 285c8a374b4d9932852d29f04d6edc83a7f38e 157B 294d6a9efcaea2dd2cb155f2962c57a551a3ed 161B 2a30e6adb82a6b1d02a1a5bf8ab5a1be3f734a 161B 2a34c60550ae93fcad5e146f7f880c8ec3c2f9 185B 2a3e15a1bb1e2913c7eb228e3cfa743646ccce 90B 2ad615c1c08f6c53609eea8ef3f79b09039c54 213B 2aff32b3038f68e0eb21ba0a6878491437339f 158B 2cd67e1cd67aca8ea3e9e5b8aced567d8e61a6 94B 30d39ba9bb1164fd03a8d33535ee4bd68a2409 192B 30f3941f8dd718599a2131fbbf7c31e122217d 283B 315ba734e7981f7418dca6189eceebf6724819 617B 3192ce485c9b3ccd1c2a2c6eb425522960dfca 157B 327af855899de0af8c672ddfd0b11632a9027b 331B 3307f9195e6c5482229d5859b53b2c953171ce 167B 34cb53894032d4b11d3e0890737f0c9e361991 580B 353ae4beca8a3821fbf826eed17129d660d83a 2KB 37b85d13a82a6e2ea3bf30d6392e6769f7f0d9 156B 37c2f051de5e64a65173455494cc973de5e98a 595B 382785d458b51edaa4b0830945b983e0fc88e5 299B 38a3306bc52744c732564290724943107818cb 94B 39860a6b61567fd53aa8ecf4ea04b60c8c7e88 82KB 3c55ed270a34e581a55400d67e31ae850fa24b 177B 3d2093e832e5ee65c2fe08fcb8398e98c23857 303B 3d73e52c6e8a99fb1072fd5a97b09b79141d86 191B 3e243d3470345bfac88c5c3bd40b98228a6355 255B 3f14c7a475e6ae5079387aca6dcce96bda0085 167B 3fd4dd739055bbafea22d2acea2df20b8004e2 238B 4090bfdc231e3eebbbc35b284e20580d329b81 73B 40cdf52b26a2e9930d1ee775bb75119175690f 186B 41482133c42877f0d784618cd006806667e3a6 114B 43536ddea4234b76cdbb6152151ffd4a7502ad 143B 444fa14eadfd5860b7643fdcd82fdff9d73f81 457B 45d7cfa3738dbf1ae93be1894aded85fecfee0 115B 4654c4e824f2828696cf10b54610d3ab129a44 119B 46cc084922a4a6f60bba0ae374c043c5960cc8 148B 46f823b10ac95d02d3757afbb61719a90dddf5 154B 474f54456a3b504414816fcfa4cb980da48536 833B 483845ece15b542f4b645210e8a1bef3ff6690 917B 48834bbefa77e00fb91731debe371603363bc8 206B 49dcd3cf5b666bb1ad305920c15051877ed441 182B 49ee9cb0d9d98db8b50b001f444c443a74e9ac 347B 4a446fd95688bc809bbbcaf6cc2514ec30308a 131B 4a6d042334ecc1cdbdd2f695aae37b6c1a8194 51B 4c2252e511a268c4fe0b6299c77673e749f330 2KB 4c42b16e33dea81b40f9ada00a45ccf96ea241 118B 4d93e4d29706694d892bbd0503cb08698ed295 833B 4de5102b0557f62f0a7496dd27f1a61b034928 94B 4e5699112029598f316776967dc41970150640 124B 0.5-devel 181B 0.5-devel 41B 5025da415006f7ae9169e85282a333d5fd492e 164B 503b53113b8167b97739b5b56de233a2647d02 147B 51496db7de8567e520e2f169b25d6053bad259 304B 5152a042b614a7e7a41087904b91d686f1e1a2 441B












