Политехнический молодежный журнал. 2019. № 08 1
УДК 519.254 DOI: 10.18698/2541-8009-2019-08-513
РЕАЛИЗАЦИЯ РАСШИРЕННОГО ФИЛЬТРА КАЛМАНА
ДЛЯ НЕЛИНЕЙНОЙ МОДЕЛИ ДВУХЗВЕННОГО МАЯТНИКА
Г.В. Лысухо
А.Л. Масленников
lyysukhogv@student.bmstu.ru
SPIN-код: 8276-4150
amas@bmstu.ru
SPIN-код: 7087-6303
МГТУ им. Н.Э. Баумана, Москва, Российская Федерация
Аннотация Ключевые слова
Для оценки вектора состояния динамических систем
применяют различные виды калмановской фильтра-
ции. Для нелинейных систем можно использовать
расширенный или сигма-точечный фильтр Калмана,
которые имеют ряд сложностей при практической
реализации. Наличие этих сложностей приводит к
повышению требований к вычислительным ресурсам,
а также к возможной потере алгоритмом вычисли-
тельной устойчивости и увеличению ошибки оценки
вектора состояния. В статье рассмотрено примене-
ние гибридной версии расширенного фильтра Калмана
первого порядка, которая позволяет устранить ряд
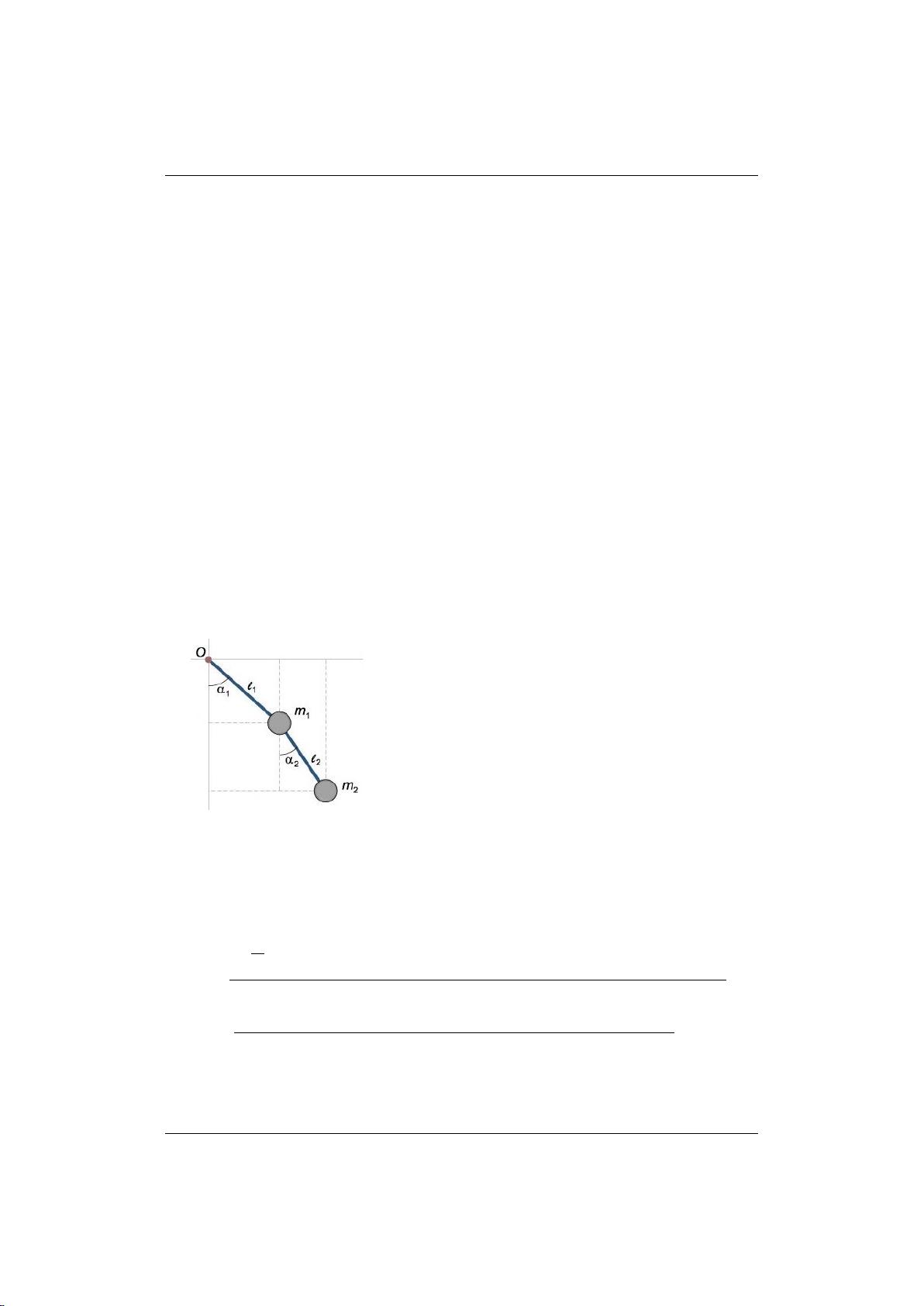
сложностей при практической реализации. В каче-
стве математической модели выбрана модель двух-
звенного маятника. При используемой реализации
фильтра Калмана гарантируется симметричность
априорной ковариационной матрицы, а также при-
меняются численные методы вычисления матрицы
первых частных производных и QR-разложения при
вычислении матрицы усиления Калмана.
Расширенный фильтр Калмана,
г
ибридный фильтр Калмана,
нелинейные системы, двухзвен-
ный маятник, метод конечных
разностей, QR-разложение, оцен-
ка вектора состояния, теория
оценивания
Поступила в редакцию 02.07.2019
© МГТУ им. Н.Э. Баумана, 2019
Введение. В системах автоматического управления зачастую требуется оцени-
вать вектор состояния (или просто состояние системы), например, в задачах
синтеза дискретных систем или задачах фильтрации навигационной информа-
ции [1, 2]. На практике численную оценку вектора состояния при наличии
входных и измерительных шумов можно получить с помощью различных
фильтров Калмана (линейного, расширенного или сигма-точечного) [3−6]. При
неизвестных параметрах входных и измерительных шумов или их нестационар-
ности, как правило, применяют адаптивные фильтры Калмана, которые не яв-
ляются отдельным видом калмановских фильтров, а расширяют функционал
линейного, расширенного или сигма-точечного фильтров Калмана [7−9].
Для линейных систем можно использовать линейные фильтры Калмана, а для
нелинейных следует применять расширенные или сигма-точечные фильтры Кал-
мана, практическая реализация которых сопряжена с рядом сложностей. Во-
本文使用 一阶混合型卡尔曼滤波
研究 双连杆模型
数值方法 计算一阶偏导矩阵——雅可比矩阵