







小偏
是
否
向左小调整
向左大调整
偏右
小偏
是
否
向左小调整
向左大调整
偏左
小偏
向右小调整
向右大调整
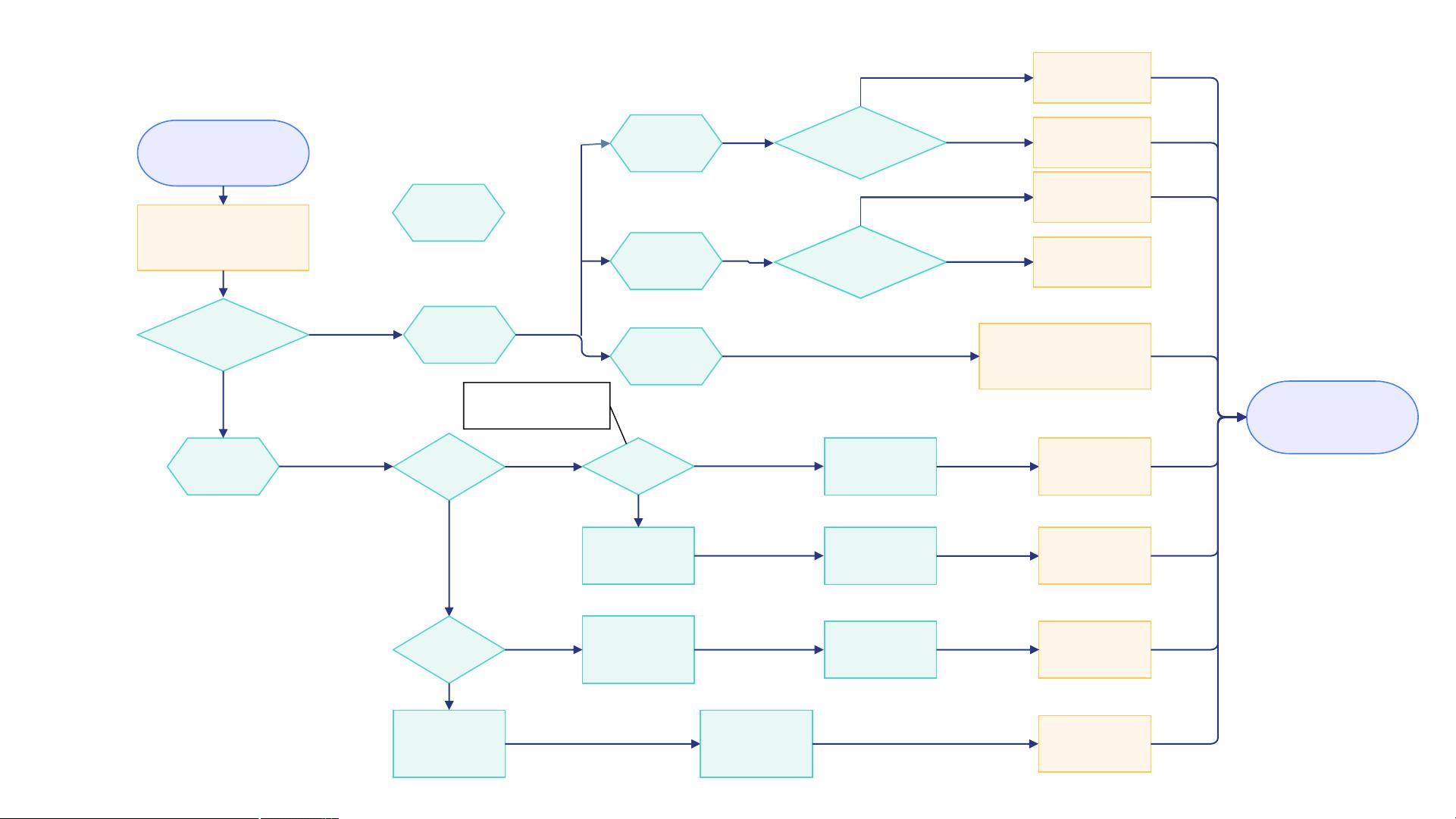
开始
读入位置状态
循迹
结束
识别到障
碍物
识别到障碍
物
是
不偏转
不做调整,继续前
进
左右都识
别到
是
目标物体
是
小车不动
开启
蜂鸣器和流水
灯
否
向右小避障
左边识别
到
是
向左寻找循迹
线
否
向左小避障
向右寻找循迹
线
向右大避障
否
向左寻找循迹
线
回归循迹
回归循迹
回归循迹
否
找到宝藏
调用openmv摄像
头识别物体
PID速度
闭 环
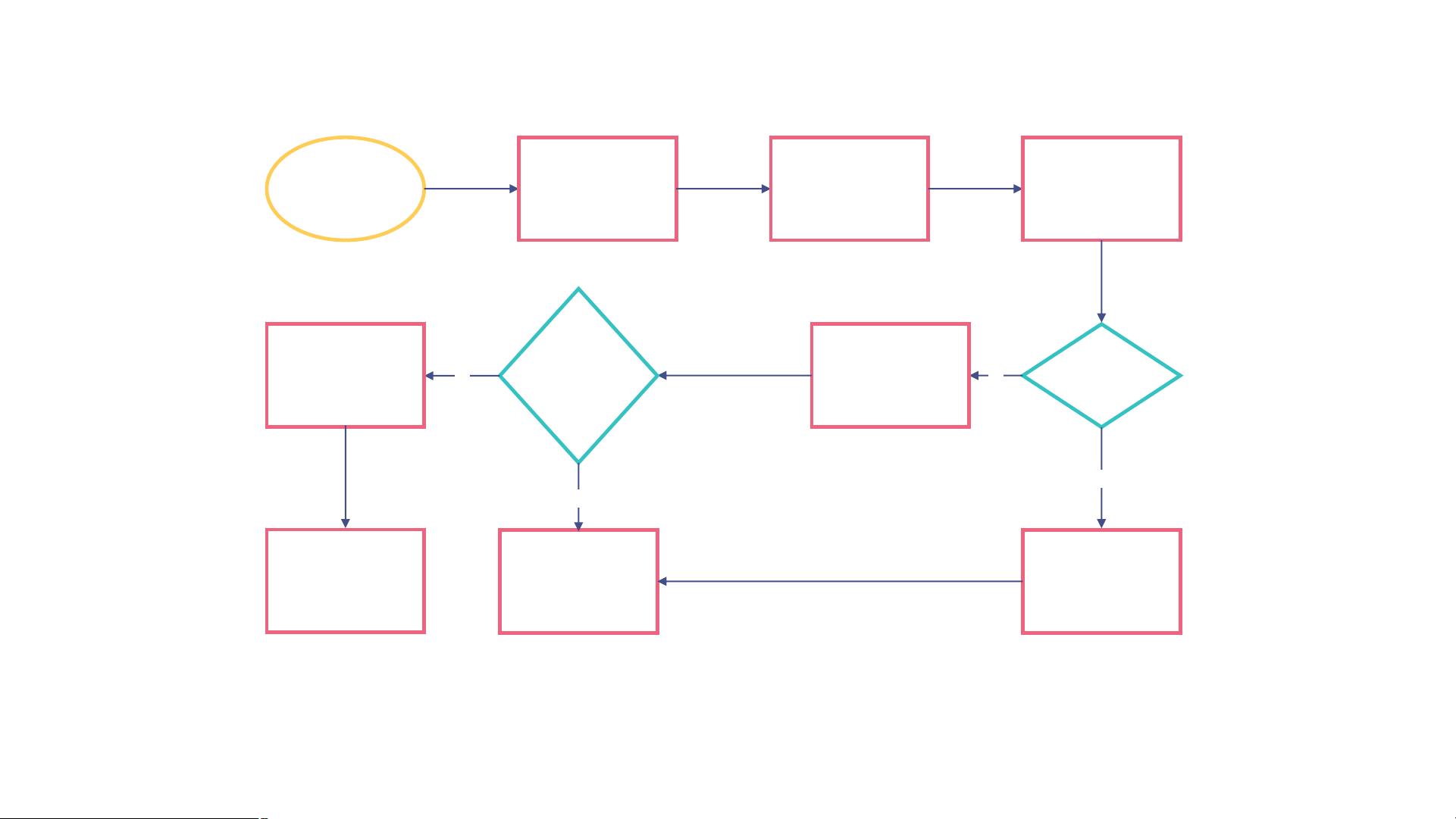
开始 启动摄像头 和主控建立通信 识别物体
目标物体
是
返回数据1
至少30次是目
标物体
连续采样50次
是
识别到目标物体
否
返回数据0不是目标物体
否
是目标物体
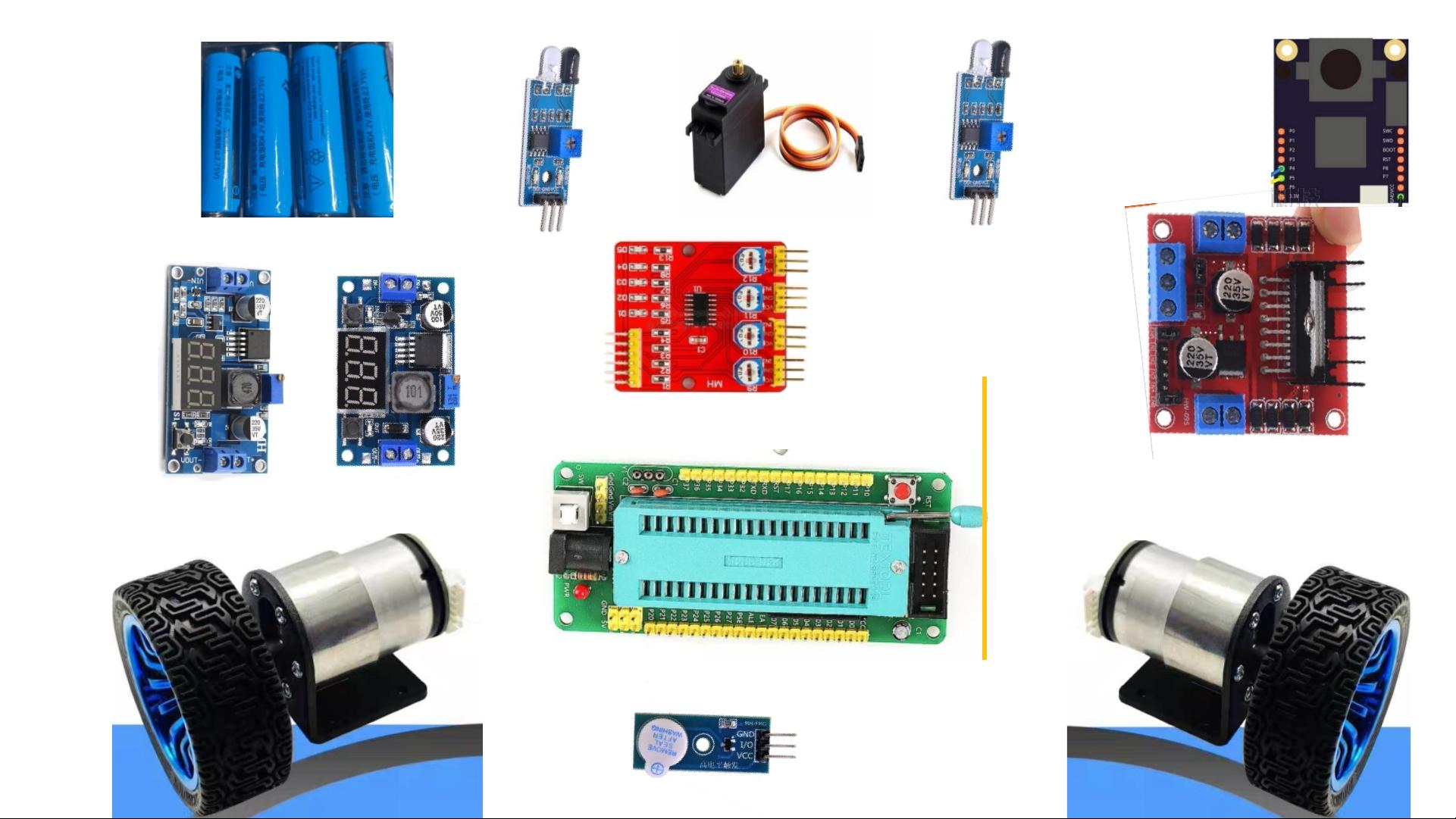
智能小车——openMV













