3
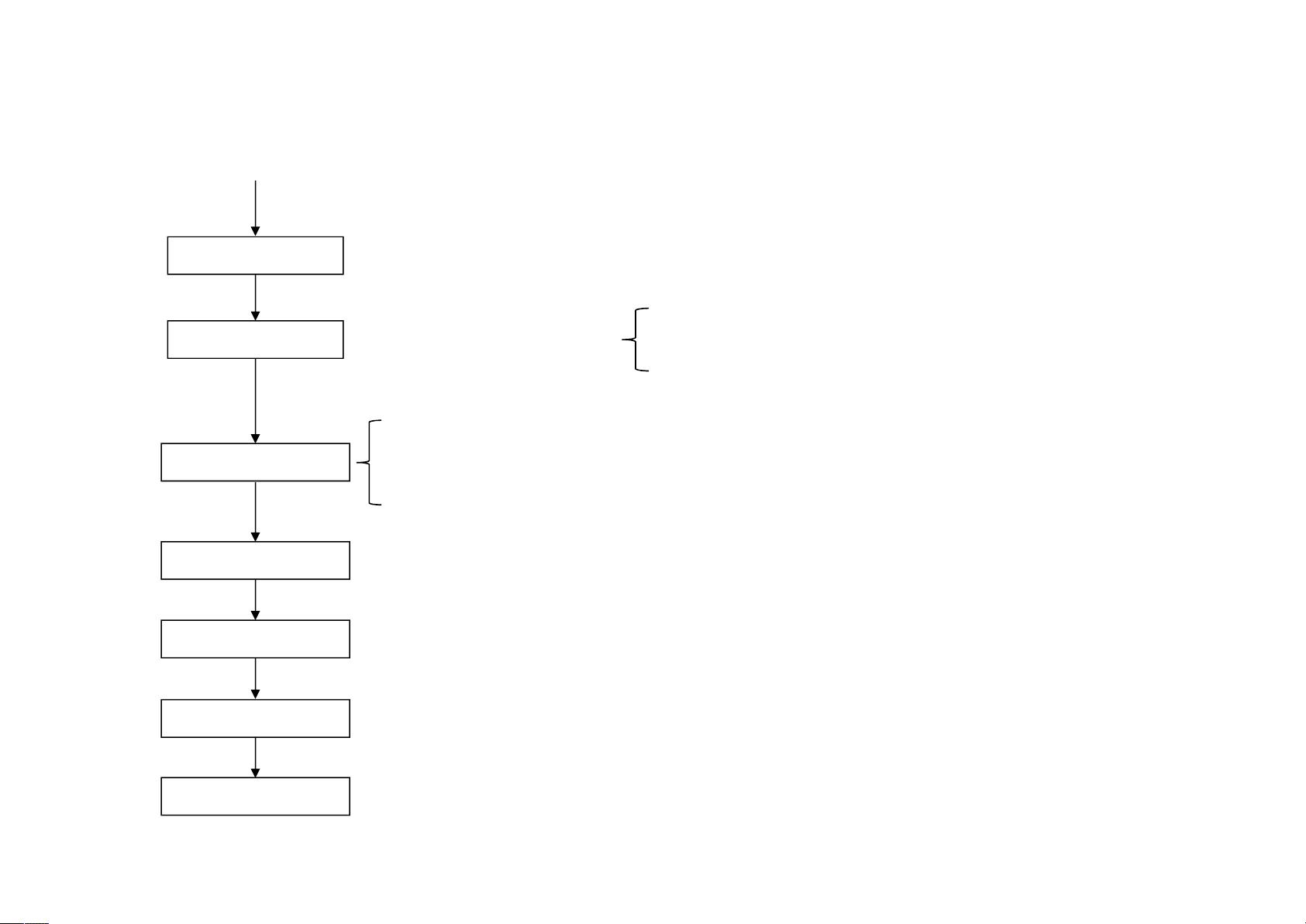
System入口:
输入图像
GrabImageStero(imRectLeft,imRectRight)
GrabImageRGBD(imRectLeft,imRectRight)
GrabImageMonocular(im)
转为灰度图
Stero: mImGray,imGrayRight
RGBD: mImGray,imDepth
Mono: mImGray
构造Frame
Stero: Frame(mImGray,imGrayRight,mpORBextractorLeft,
mpORBextractorRight)
RGBD: Frame(mImGray,imDepth,mpORBextractorLeft)
Mono(未初始化): Frame(mImGray,mpIniORBextractor)
Mono(已初始化): Frame(mImGray,mpORBextractorLeft)
Track
数据流进入Tracking线程
注:mpIniORBextractor相比mpORBextractorLeft提取的特征点多一倍
2016/8/30